
Шим на attiny13
Содержание
Занятие №8. Реализация ШИМ
Под режимом работы 16-разр. таймера понимается его алгоритм счета и поведение связанного с ним выхода формирователя импульсов, что определяется комбинацией бит, задающих режим работы таймера (WGMn3-0) и режим формирования выходного сигнала (COMnx1:0). При этом биты задания режима формирования выходного сигнала не влияют на алгоритм счета, т.к. алгоритм счета зависит только от состояния бит задания режима работы таймера. В режимах с ШИМ биты COMnx1:0 позволяют включить/отключить инверсию на генерируемом ШИМ-выходе (т.е. выбрать ШИМ с инверсией или ШИМ без инверсии). Для режимов без ШИМ биты COMnx1:0 определяют, какое действие необходимо выполнить при возникновении совпадения: сбросить, установить или инвертировать выход (см. также “Блок формирования выходного сигнала” и «Временные диаграммы 16-разр. таймеров-счетчиков»).
Нормальный режим работы
Самым простым режимом работы является нормальный режим (WGMn3-0 = 0b0000). В данном режиме счетчик работает как суммирующий (инкрементирующий), при этом сброс счетчика не выполняется. Переполнение счетчика происходит при переходе через максимальное 16-разр. значение (0xFFFF) к нижнему пределу счета (0x0000). В нормальном режиме работы флаг переполнения таймера-счетчика TOVn будет установлен на том же такте синхронизации, когда TCNTn примет нулевое значение.
Фактически, флаг переполнения TOVn является 17-ым битом таймера-счетчика за тем исключением, что он только устанавливается и не сбрасывается. Однако программно это свойство может быть использовано для повышения разрешающей способности таймера, если использовать прерывание по переполнению таймера, при возникновении которого флаг TOVn сбрасывается автоматически. Для нормального режима работы не существует каких-либо особых ситуаций, поэтому запись нового состояния счетчика может быть выполнена в любой момент.
В нормальном режиме можно использовать блок захвата. Однако при этом следует соблюдать, чтобы максимальный интервал времени между возникновениями внешних событий не превысил периода переполнения счетчика. Если такое условие не соблюдается, необходимо использовать прерывание по переполнению таймера-счетчика или предделитель.
Блок сравнения может использоваться для генерации прерываний. Не рекомендуется использовать выход OCnx для генерации сигналов в нормальном режиме работы, т.к. в этом случае будет затрачена значительная часть процессорного времени.
Режим сброса таймера при совпадении (СТС)
В режиме СТС (WGM01, WGM00 =0b10) регистр OCR0 используется для задания разрешающей способности счетчика. Если задан режим CTC и значение счетчика (TCNT0) совпадает со значением регистра OCR0, то счетчик обнуляется (TCNT0=0). Таким образом, OCR0 задает вершину счета счетчика, а, следовательно, и его разрешающую способность. В данном режиме обеспечивается более широкий диапазон регулировки частоты генерируемых прямоугольных импульсов. Он также упрощает работу счетчика внешних событий.
В режиме сброса таймера при совпадении (WGMn3-0 = 0b0100 или 0b1100) разрешающая способность таймера задается регистрами OCRnA или ICRn. В режиме СТС происходит сброс счетчика (TCNTn), если его значение совпадает со значением регистра OCRnA (WGMn3-0 = 0b0100) или с ICRn (WGMn3-0 = 0b1100). Значение регистра OCRnA или ICRn определяет верхний предел счета, а, следовательно, и разрешающую способность таймера. В данном режиме обеспечивается более широкий диапазон регулировки частоты генерируемых прямоугольных импульсов. Он также упрощает работу счетчика внешних событий. Временная диаграмма работы таймера в режиме СТС показана на рисунке 1. Счетчик (TCNTn) инкрементирует свое состояние до тех пор, пока не возникнет совпадение со значением OCRnA или ICRn, а затем счетчик (TCNTn) сбрасывается.
 Рисунок 1 – Временная диаграмма для режима СТС
Рисунок 1 – Временная диаграмма для режима СТС
По достижении верхнего предела счета может генерироваться прерывание с помощью флагов OCFnA или ICFn, соответствующим используемым регистрам для задания верхнего предела счета. Если прерывание разрешено, то процедура обработки прерывания может использоваться для обновления верхнего предела счета. Однако, задание значения вершины счета близкого к значению нижнего предела счета, когда счетчик работает без предделения или с малым значением предделения, необходимо выполнять с особой осторожностью, т.к. в режиме СТС нет двойной буферизации. Если значение, записанное в OCRnA или ICRn, меньше текущего значения TCNTn, то сброс счетчика по условию совпадения наступит, когда он достигнет максимального значения (0xFFFF), затем перейдет в исходное состояние 0x0000 и достигнет нового значения OCRnA или ICRn. Во многих случаях возникновение такой ситуации не желательно. В качестве альтернативы может выступить режим быстрой ШИМ, где регистр OCRnA определяет верхний предел счета (WGMn3-0 = 0b1111), т.к. в этом случае OCRnA имеет двойную буферизацию.
Для генерации сигнала в режиме CTC выход OCnA может использоваться для изменения логического уровня при каждом совпадении, для чего необходимо задать режим переключения (COMnA1, COMnA0 = 0b01). Значение OCnA будет присутствовать на выводе порта, только если для данного вывода задано выходное направление. Максимальная частота генерируемого сигнала равна fOC0 = fclk_I/O/2, если OCRnA = 0x0000. Для других значений OCRn частоту генерируемого сигнала можно определить по формуле:
где переменная N задает коэффициент деления предделителя (1, 8, 32, 64, 128, 256 или 1024).
Также как и для нормального режима работы, флаг TOV0 устанавливается на том же такте таймера, когда его значение изменяется с 0xFFFF на 0x0000.
Режим быстрой ШИМ (FAST PWM)
Режим быстрой широтно-импульсной модуляции (ШИМ) (WGMn3-0 = 0b0101, 0b0110, 0b0111, 0b1110, 0b1111) предназначен для генерации ШИМ-импульсов повышенной частоты. В отличие от других режимов работы в этом используется однонаправленная работа счетчика. Счет выполняется в направлении от нижнего к верхнему пределу счета.
Если задан неинвертирующий режим выхода, то при совпадении TCNTn и OCRnx сигнал OCnx устанавливается, а на верхнем пределе счета сбрасывается. Если задан инвертирующий режим, то выход OCnx сбрасывается при совпадении и устанавливается на верхнем пределе счета. За счет однонаправленности счета, рабочая частота для данного режима в два раза выше по сравнению с режимом ШИМ с фазовой коррекцией, где используется двунаправленный счет. Возможность генерации высокочастотных ШИМ сигналов делает использование данного режима полезным в задачах стабилизации питания, выпрямления и цифро-аналогового преобразования. Высокая частота, при этом, позволяет использовать внешние элементы физически малых размеров (индуктивности, конденсаторы), тем самым снижая общую стоимость системы.
Разрешающая способность ШИМ может быть фиксированной 8, 9 или 10 разрядов или задаваться регистром ICRn или OCRnA, но не менее 2 разрядов (ICRn или OCRnA = 0x0003) и не более 16 разрядов (ICRn или OCRnA = 0xFFFF). Разрешающая способность ШИМ при заданном значении верхнего предела (ВП) вычисляется следующим образом:
В режиме быстрой ШИМ счетчик инкрементируется до совпадения его значения с одним из фиксированных значений 0x00FF, 0x01FF или 0x03FF (если WGMn3:0 = 0b0101, 0b0110 или 0b0111, соответственно), значением в ICRn (если WGMn3:0 = 0b1110) или значением в OCRnA (если WGMn3:0 = 0b1111), а затем сбрасывается следующим тактом синхронизации таймера. Временная диаграмма для режима быстрой ШИМ представлена на рисунке 2. На рисунке показан режим быстрой ШИМ, когда для задания верхнего предела используется регистр OCRnA или ICRn. Значение TCNTn на временной диаграмме показано в виде графика функции для иллюстрации однонаправленности счета. На диаграмме показаны как инвертированный, так и неинвертированный ШИМ-выходы. Короткой горизонтальной линией показаны точки на графике TCNTn, где совпадают значения OCRnx и TCNTnx. Флаг прерывания OCnx устанавливается при возникновении совпадении.
Рисунок 2 – Временная диаграмма для режима быстрой ШИМ
Флаг переполнения таймера-счетчика (TOVn) устанавливается всякий раз, когда счетчик достигает верхнего предела. Дополнительно тем же тактовым импульсом вместе с флагом TOVn могут установиться флаги OCnA или ICFn, если для задания верхнего предела используется регистр OCRnA или ICRn, соответственно. Если одно из этих прерываний разрешено, то в процедуре обработки прерывания может быть выполнено обновление верхнего предела счета и порогов сравнения.
Если изменяется значение верхнего предела счета, то необходимо соблюдение условия, чтобы записываемое новое значение верхнего предела было больше или равно значений во всех регистрах порога сравнения. В противном случае совпадение между TCNTn и OCRnx никогда не возникнет. Обратите внимание, что при использовании фиксированных значений верхнего предела во время записи в регистры OCRnx происходит маскирование к 0 неиспользуемых разрядов.
Механизм модификации регистра ICRn отличается от OCRnA в том случае, если он используется для задания верхнего предела. Регистр ICRn не имеет двойной буферизации. Это означает, что если в ICRn записывается малое значение во время работы счетчика с малым предделением или без него, то имеется опасность записи в регистр ICRn значения, которое окажется меньше текущего значения TCNTn. Как результат, в такой ситуации будет пропущено совпадение на вершине счета. В этом случае счетчик дойдет до максимального значения (0xFFFF), перезапустится со значения 0x0000, а только затем возникнет совпадение. Регистр OCRnA содержит схему двойной буферизации, поэтому, его можно модифицировать в любой момент времени.
class=»eliadunit»>
Если выполняется запись по адресу OCRnA, то фактически значение помещается в буферный регистр OCRnA. Если же возникает совпадение между TCNTn и вершиной счета, то следующим тактом синхронизации таймера происходит копирование буферного регистра в регистр порога сравнения OCRnA. Обновление регистра выполняется тем же тактом, что и сброс TCNTn и установка флага TOVn.
Рекомендуется использовать регистр ICRn для задания верхнего предела, если верхний предел счета является константой. В этом случае также освобождается регистр OCRnA для генерации ШИМ-сигнала на выходе OCnA. Однако, если частота ШИМ динамически изменяется (за счет изменения верхнего предела), то в этом случае выгоднее использовать регистр OCRnA для задания верхнего предела, т.к. он поддерживает двойную буферизацию.
В режиме быстрой ШИМ блоки сравнения позволяют генерировать ШИМ-сигналы на выводах OCnx. Если COMnx1:0 =0b10, то задается ШИМ без инверсии выхода, а если COMnx1:0 = 0b11, то задается режим ШИМ с инверсией на выходе (см. таблицу 59). Фактическое значение OCnx можно наблюдать на выводе порта, если для него задано выходное направление (DDR_OCnx). ШИМ-сигнал генерируется путем установки (сброса) регистра OCnx при возникновении совпадения между OCRnx и TCNTn, а также путем сброса (установки) регистра OCnx вместе со сбросом счетчика (переход с верхнего предела на нижний предел).
Частота ШИМ выходного сигнала для заданного значения верхнего предела (ВП) определяется выражением:
где N – переменная, которая задает значение коэффициента предделения (1, 8, 32, 64, 128, 256 или 1024).
Запись предельных значений в регистр OCRnx связана с особыми случаями в генерации ШИМ-импульсов. Если OCRnx установить равным нижнему пределу (0x0000), то на выходе будет возникать короткий импульс каждый (ВП+1)-ый такт синхронизации таймера. Запись в OCRnx значения равного верхнему пределу приведет к установке постоянного уровня лог. 1 или 0 на выходе (зависит от выбранной с помощью бит COMnx1:0 полярности выходного сигнала).
Если требуется генерация меандра (прямоугольные импульсы со скважностью 2 или заполнением 50%) высокой частоты, то необходимо использовать режим быстрой ШИМ с установкой бит COMnA1:0 = 0b01, которая вызывает переключение (инвертирование) логического уровня на выходе OCnA при каждом совпадении. Данное применимо, только если OCRnA используется для задания верхнего предела (WGMn3-0 =0b1111). Максимальная генерируемая частота меандра в этом случае fOCnA = fclk_I/O/2, если OCRnA =0x0000. Данная особенность аналогична переключению OCnA в режиме СТС за исключением двойной буферизации, которая имеется в режиме быстрой ШИМ.
Режим широтно-импульсной модуляции с фазовой коррекцией (Phase Correct)
Режим широтно-импульсной модуляции с фазовой коррекцией (ШИМ ФК) (WGMn3-0 = 0b0001, 0b010, 0b0011, 0b1010 или 0b1011) предназначен для генерации ШИМ сигнала с фазовой коррекцией и высокой разрешающей способностью. Режим ШИМ ФК основан на двунаправленной работе таймера-счетчика. Счетчик циклически выполняет счет в направлении от нижнего предела (0x0000) до верхнего предела, а затем обратно от верхнего предела к нижнему пределу. Если задан неинвертирующий режим выхода формирователя импульсов, то выход OCnx сбрасывается/устанавливается при совпадении значений TCNTn и OCRnx во время прямого/обратного счета. Если задан инвертирующий режим выхода, то, наоборот, во время прямого счета происходит установка, а во время обратного – сброс выхода OCnx. При двунаправленной работе максимальная частота ШИМ-сигнала меньше, чем при однонаправленной работе, однако, за счет такой особенности, как симметричность в режимах ШИМ с двунаправленной работой, данные режимы предпочитают использовать при решении задач управления приводами.
Разрешающая способность ШИМ в данном режиме может быть либо фиксированной (8, 9 или 10 разрядов) либо задаваться с помощью регистра ICRn или OCRnA. Минимальная разрешающая способность равна 2-м разрядам (ICRn или OCRnA = 0x0003), а максимальная -16-ти разрядам (ICRn или OCRnA =0xFFFF). Если задан верхний предел, то разрешающая способность ШИМ в данном режиме определяется следующим образом:
В режиме ШИМ ФК счетчик инкрементируется пока не достигнет одного из фиксированных значений 0x00FF, 0x01FF или 0x03FF (соответственно для WGMn3-0 = 0b0001, 0b0010 или 0b0011), а также значения равного ICRn (если WGMn3-0 = 0b1010) или OCRnA (если WGMn3:0 = 0b1011). Далее, при достижении верхнего предела, счетчик изменяет направление счета. Значение TCNTn остается равным верхнему пределу в течение одного такта синхронизации таймера. Временная диаграмма для режима ШИМ ФК представлена на рисунке 3. На рисунке показан режим ШИМ ФК с использованием регистра OCRnA или ICRn для задания верхнего предела. Состояние TCNTn представлено в виде графика функции для иллюстрации двунаправленности счета. На рисунке представлены, как неинвертированный, так и инвертированный ШИМ-выход. Короткие горизонтальные линии указывают точки на графике изменения TCNTn, где возникает совпадение со значением OCRnx. Флаг прерывания OCnx устанавливается при возникновении совпадения.
 Рисунок 3 – Временная диаграмма для режима ШИМ ФК
Рисунок 3 – Временная диаграмма для режима ШИМ ФК
Флаг переполнения таймера-счетчика (TOVn) устанавливается всякий раз, когда счетчик достигает нижнего предела. Если для задания верхнего предела используется регистр OCRnA или ICRn, то, соответственно устанавливается флаг OCnA или ICFn тем же тактовым импульсом, на котором произошло обновление регистра OCRnx из буферного регистра (на вершине счета). Флаги прерывания могут использоваться для генерации прерывания по достижении счетчиком нижнего или верхнего предела.
При изменении значения верхнего предела счета необходимо следить, чтобы оно было больше или равно значениям во всех регистрах сравнения. В противном случае совпадение между TCNTn и OCRnx никогда не возникнет. Обратите внимание, что при использовании фиксированных значений верхнего предела счета во время записи в регистры OCRnx неиспользуемые разряды обнуляются. Третий период на рисунке 53 иллюстрирует случай, когда динамическое изменение верхнего предела счета приводит к генерации несимметричного импульса. Данная особенность основывается на времени обновления регистра OCRnx. Поскольку, обновление OCRnx возникает на вершине счета, то и период ШИМ начинается и заканчивается на вершине счета. Это подразумевает, что длительность обратного счета определяется предыдущим значением верхнего предела, а прямого – новым значением верхнего предела. Если два этих значения разные, то и длительность прямого и обратного счета будет также отличаться. Различие в длительности приводит несимметричности выходных импульсов.
Если стоит задача изменения верхнего предела при работающем счетчике, то вместо этого режима рекомендуется использовать режим ШИМ ФЧК (фазовая и частотная коррекция). Если используется статическое значение верхнего предела, то между данными режимами практически нет отличий.
В режиме ШИМ ФК блоки сравнения позволяют генерировать ШИМ-сигналы на выводах OCnx. Если установить COMnx1:0 = 0b10, то выход ШИМ будет без инверсии, а если COMnx1:0=0b11, то с инверсией. Фактическое значение OCnx можно наблюдать на выводе порта, если в регистре направления данных для данного вывода порта задано выходное направление (DDR_OCnx). ШИМ-сигнал генерируется путем установки (сброса) регистра OCnx при совпадении значений OCRnx и TCNTn во время прямого счета, а также путем сброса (установки) регистра OCnx при совпадении между OCRnx и TCNTn во время обратного счета. Результирующая частота ШИМ-сигнала в режиме ШИМ ФК при заданном верхнем пределе (ВП) может быть вычислена по следующему выражению:
где N – коэффициент деления предделителя (1, 8, 32, 64, 128, 256 или 1024).
Запись предельных значений в регистр OCRnx связано с особыми случаями в генерации ШИМ-сигналов в режиме ШИМ ФК. Если задать режим ШИМ без инверсии и OCRnx установить равным нижнему пределу, то на выходе непрерывно будет установлен лог. 0, а если равным верхнему пределу, то на выходе постоянно присутствует лог. 1. Для ШИМ с инверсией указанные уровни необходимо заменить противоположными.
Если задать использование OCnA в качестве верхнего предела (WGMn3:0 = 0b1011) и установить COMnA1:0 =0b01, то на выходе OCnA будет генерироваться меандр.
Режим широтно-импульсной модуляции с фазовой и частотной коррекцией (Phase and Frequency Correct)
Режим широтно-импульсной модуляции с фазовой и частотной коррекцией (ШИМ ФЧК) (WGMn3-0 = 0b1000 или 0b1001) предназначен для генерации ШИМ-импульсов высокой разрешающей способности с фазовой и частотной коррекцией. Также как и режим ШИМ ФК режим ШИМ ФЧК основан на двунаправленной работе счетчика. Счетчик циклически считает от нижнего предела (0x0000) до верхнего предела, а затем обратно от верхнего предела к нижнему пределу. Если задан неинвертирующий режим ШИМ, то выход OCnx сбрасывается, если возникает совпадение между TCNTn и OCRnx во время прямого счета, и устанавливается, если возникает совпадение во время обратного счета. В инвертирующем режиме работа инверсная. Двунаправленная работа, по сравнению с однонаправленной, связана с генерацией более низких частот. Однако, благодаря симметричности в режимах ШИМ с двунаправленным счетом, их применение предпочтительно в задачах управления приводами.
Основное отличие между режимами ШИМ ФК и ШИМ ФЧК состоит в моменте обновления регистра OCRnx из буферного регистра OCRnx (см. рисунок 3 и рисунок 4).
Разрешающая способность ШИМ в этом режиме может задаваться с помощью регистра ICRn или OCRnA. Минимальная разрешающая способность равна 2-ум разрядам (ICRn или OCRnA = 0x0003), а максимальная разрешающая способность — 16-ти разрядам (ICRn или OCRnA = 0xFFFF). Разрешающая способность ШИМ в разрядах может быть вычислена по следующему выражению:
В режиме ШИМ ФЧК счетчик инкрементируется до совпадения со значением в ICRn (WGMn3:0 = 0b1000) или в OCRnA (WGMn3:0 = 0b1001). Это означает достижение вершины счета, после чего происходит изменение направления счета. Значение TCNTn остается равным вершине счета в течение одного такта синхронизации таймера. Временная диаграмма для режима ШИМ ФЧК показана на рисунке 54. На рисунке показан режим ШИМ ФЧК, когда вершину счета задает регистр OCRnA или ICRn. Значение TCNTn показано в виде графика функции для иллюстрации двунаправленности счета. На диаграмме показан как неинвертирующий, так и инвертирующий ШИМ выходы. Короткие горизонтальные линии указывают на точки график TCNTn, где возникает совпадение между OCRnx и TCNTn. Флаг прерывания OCnx устанавливается после возникновения совпадения.
 Рисунок 4 – Временная диаграмма режима ШИМ с фазовой и частотной коррекцией
Рисунок 4 – Временная диаграмма режима ШИМ с фазовой и частотной коррекцией
Флаг переполнения таймера-счетчика (TOVn) устанавливается тем же тактом, когда произошло обновление регистров значением из буферного регистра (на нижнем пределе счета). Если для задания верхнего предела используется регистр OCRnA или ICRn, то по достижении счетчиком верхнего предела устанавливается флаг OCnA или ICFn, соответственно. Флаги прерывания могут использоваться для генерации прерывания при достижении счетчиком верхнего или нижнего предела.
При изменении верхнего предела необходимо следить, чтобы новое значение было больше или равно значениям во всех регистрах порога сравнения. В противном случае, если задано значение верхнего предела меньше любого из значений регистров порога сравнения, совпадение между TCNTn и OCRnx никогда не наступит.
На рисунке 4 показано, что в отличие от режима ШИМ ФК, генерируемый выходной сигнал симметричен на всех периодах. Поскольку, регистры OCRnx обновляются на нижнем пределе счета, то длительности прямого и обратного счетов всегда равны. В результате выходные импульсы имеют симметричную форму, а, следовательно, и откорректированную частоту.
Использование регистра ICRn для задания верхнего предела рекомендуется, если значение верхнего предела является константой. В этом случае также освобождается регистр OCRnA для широтно-импульсной модуляции импульсов на выводе OCnA. Однако если требуется динамическое изменение частоты ШИМ за счет изменения верхнего предела, то для задания верхнего предела рекомендуется использовать регистр OCRnA за счет наличия у него двойной буферизации.
В режиме ШИМ ФЧК блоки сравнения позволяют генерировать ШИМ-импульсы на выводе OCnx. Если COMnx1:0 = 0b10, то задается неинвертирующий ШИМ выход, а, если COMnx1:0=0b11, то инвертирующий (см. таблицу 60). Значение OCnx будет присутствовать на соответствующем выводе порта только в случае, если для него задано выходное направление. ШИМ сигнал генерируется путем установки (сброса) регистра OCnx при совпадении между OCRnx и TCNTn во время прямого счета и сброса (установки) регистра OCnx при совпадении между OCRnx и TCNTn во время обратного счета. Частота ШИМ в данном режиме при заданном верхнем пределе (ВП) счета определяется следующим образом:
где N – коэффициент деления предделителя (1, 8, 32, 64, 128, 256 или 1024).
Запись предельных значений в регистр OCRnx связана с особыми случаями в генерации ШИМ-сигналов в данном режиме. Если задать OCRnx равным нижнему пределу (0x0000), то в неинвертирующем режиме на выходе будет постоянного присутствовать низкий логический уровень, а при записи значения равного верхнему пределу на выходе будет длительно присутствовать высокий логический уровень. В инвертирующем режиме приведенные уровни будут противоположными.
Если OCRnA используется для задания верхнего предела (WGMn3:0 = 0b1001) и COMnA1:0 = 0b01, то на выходе OCnA будет генерироваться меандр.
>Программная ШИМ (PWM)
ШИМ — Широтно импульсная модуляция
PWM — Pulse Width Modulation (т.е. то же самое, что и ШИМ)
>Что такое ШИМ и зачем он нужен?
Алгоритм
Простейший вариант — вечный цикл. Вариант с прерыванием будет позже (ниже), сейчас рассмотрим простой пример, чтобы понять суть.
Во-первых надо определить с двумя вещами: с какой частотой будут моргать светодиоды, чтобы не было видно этого моргания и, второе, сколько уровней яркости может иметь светодиод.
По уровням яркости пусть будет 256. 0 — выключен полностью, 255 — включен полностью (т.е. ШИМ канал находится в логической единице все время, т.е. duty cycle = 100%.
Что такое duty cycle: http://en.wikipedia.org/wiki/Duty_cycle
Однако, сейчас я малек запутаю вас.
Суть в том, что у нас ПЛЮС диода на схеме тыкнут на прямую на питание, а минус идет через резистор к ноге (где резистор — не важно, важно что к ноге МК). Поэтому светодиод светится, когда на ноге МК низкий уровень, т.е. ноль, т.е. нога внутри МК прокинута на GND, т.е. на ЗЕМЛЮ. Это значит, что на самом деле 0 и 1 в ШИМ должны быть инвертированы. Т.е. чем дольше в сигнале будет 0 по отношению к 1, тем ярче будет диод.
И так, уровней яркости 256.
О каком моргании идет речь? Суть в том, что если мы должны подать ШИМ сигнал на много много диодов и делаем это последовательно на каждый, то после вывода сигнала на первый диод надо вернуться к выводу сигнала на него же за такое время, чтобы:
- успеть сформировать полноценный ШИМ сигнал,
- не прошло более 1/25 секунды, иначе будет заметное мигание светодиода,
- между отрезками сигнала ШИМ не было заметных пауз в генерации шим, т.е. чтобы ШИМ сигнал НЕ БЫЛ ИСКАЖЕН.
Вот пример искажения ШИМ сигнала:
Мы это все будем иметь ввиду, но на самом деле нам здесь это не важно, так как у нас будет очень простая плавная мигалка и она будет только изменять яркость, т.е. времени будет предостаточно, а задача настолько проста, что не будет отъедать время от генерации ШИМ сигнала.
И так, вот исходный код (для AVR studio, т.е. gcc):
Принцип работы программы
Есть счетчик отрезков времени — scancount. Максимальное значение этого счетчика — это количество уровней яркости минус 1. Каждый оборот цикла он увеличивается на единицу, потом переваливает за 255 и снова становится 0. В каждом обороте цикла происходит установка сигнала для каждого светодиода. Если счетчик меньше больше или равен уровню яркости, то выключаем диод. Если счетчик меньше уровня яркости заданного для диода — то включаем это диод. И как каждый цикл. Например, если уровень яркости равен 0, то счетчик всегда будет равен или более нуля и диод всегда будет выключен. Если уровень яркости 255, то счетчик будет меньше этого значения 254 из 255 оборотов счетчика и будет гореть практически в полную силу. Если яркость установлена в 50, то 50 первых оборотом цикла диод будет включен, а 206 оставшихся оборотов — выключен, т.е. на него будет подана 50/256 тока от максимума.
Ниже в программе идет управление уровнем яркости диодом, чтобы была какая-то демонстрация. При каждом переполнении счетчика к яркости всех диодов добавляется 1, но если яркость становится более 128, то она сбрасывается в 0. Вообще, если бы не было этой проверки, то после достижения уровня яркости в 255 она сама бы сбросилась в ноль, но опыт показал, что после яркости в 128 она нарастает так незаметно, что можно считать что при значении в 128 она уже практически максимум. И чтобы получаемый эффект был более динамичный и была введена это проверка.
Надо также знать, что зависимость яркости от тока у светодиодов НЕ ЛИНЕЙНАЯ. Т.е. 128 не в два раза тусклее, чем 255 и не в 2 раза ярче, чем 64.
За сколько проворачивается весь цикл со всеми диодами, нас здесь мало интересует, так как понятно, что на чистоте 1Мгц (именно на ней у меня работает МК), это будет достаточно быстро, чтобы глаз не видел никаких мерцаний.
Фото сборки:
нажмите на фото, чтобы увеличить
И вот видео работы: (avi, divx, 3MB)
Видео плохо показывает процесс перехода яркости, так как матрица фотоаппарата не обладает такой инерцией зрения, как человеческий глаз, но, в целом, процесс виден.
Урок 4. Использование ШИМ в AVR микроконтроллерах
 ШИМ (PWM) — широтно-импульсная модуляция. Не нужно пугаться данного термина. Это всего навсего способ регулирования напряжения. Допустим подсветка монитора горит слишком ярко, вы меняете яркость. А что же происходит в этот момент на самом деле?
ШИМ (PWM) — широтно-импульсная модуляция. Не нужно пугаться данного термина. Это всего навсего способ регулирования напряжения. Допустим подсветка монитора горит слишком ярко, вы меняете яркость. А что же происходит в этот момент на самом деле?
Представим себе, что подсветка монитора это несколько светодиодов. Питается все это дело от постоянного напряжения. Но вот нам понадобилось уменьшить яркость монитора. Логично ответить, что это можно сделать переменным резистором. На маленьких токах — возможно. Но на больших, резистор будет сильно греться. Сильно возрастут габариты, потери, энергопотребление.
Поэтому люди придумали схему на транзисторах, которая делает из постоянного напряжения пульсирующее. Оказывается, пульсирующее напряжение, в зависимости от заполнения периода будет эквивалентно постоянному напряжению. Т.е. если в течение периода напряжение 50% времени было включено, 50% выключено, то эквивалент постоянного напряжения будет равен 50% от номинального.
В цифрах это просто — было 5В постоянного напряжения прогнали через ШИМ — получили 2,5В. Если заполнение импульса равно 75%, то эквивалентное постоянное напряжение будет 3,75В. Думаю идея понятна.
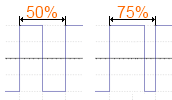
Теперь приступим к практической реализации. Будем при помощи микроконтроллера изменять заполнение от 0 до 100%, потом от 100% до нуля. Конечный результат должен выглядеть так:
Чтобы было более наглядно, подключим светодиод. В результате у нас будет плавно включаться и отключаться светодиод.
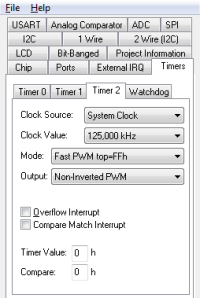
Запускаем наш любимый CodeVision. Создаем проект при помощи мастера. В разделе таймеров (Timers), выбираем Timer 2 и выставляем настройки как на рисунке.
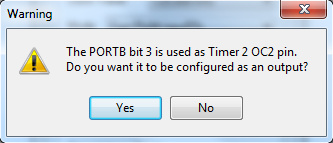
Если попробовать сгенерировать проект, то прога может ругнуться. Соглашаемся, ведь у нас нога 3 порта В должна быть настроена как выход.
Приводим код к следующему виду:
Уделим внимание строке OCR2=0x00; Эта переменная как раз и отвечает за величину заполнения импульса. Изменяется данная величина от 0 до 255(0хFF), т.е. 255 соответствует 100% -му заполнению (постоянный ток). Следовательно, если нужно 30% заполнение (255/100)*30=77. Далее 77 переводим в шестнадцатеричную систему OCR2=0x4D;
TCCR2=0x6C; Изменяя данную величину мы можем регулировать частоту ШИМ. Величина частоты работы ШИМ кратна частоте, на которой работает микроконтроллер. В проекте использована частота микроконтроллера 8 МГц, частоту ШИМ использовали 125кГц, следовательно делитель равен 8/125=64
0x6C в двоичной системе счисления 1101100, открываем даташит на Atmega8 и видим описание регистра TCCR2, так вот 1101100 последние цифры 100 и отвечают за выбор частоты работы ШИМ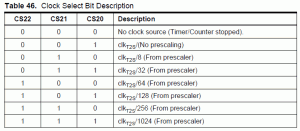
Приступим непосредственно к программе:
Код прост до безобразия: сначала в цикле увеличиваем заполнение от 0 до 255(ff), потом уменьшаем от 255 до 0.
И напоследок видосик, как это все должно работать. Успехов в изучении)
Первый пример
У микроконтроллера есть встроенные таймеры, которые и управляют формированием ШИМ-сигнала. Для использования достаточно правильно настроить таймер и затем для формирования сигнала потребуется только изменять состояние одного регистра.
Вообще, таймеры в микроконтроллерах — очень полезная вещь. Они позволяют точно отмерять время, выполнять «фоновые» программы и т.д. Их полный функционал описан в datasheet от производителя микроконтроллера. В этой статье мы не будем описывать весь функционал таймера, а остановимся только на том, что понадобится нам для генерирования ШИМ-сигнала.
Прежде чем начать объяснения, давайте посмотрим как это будет выглядеть. Скомпилируйте и загрузите в память микроконтроллера следующую программу:
#define F_CPU 16000000UL //16MHz #include <avr/io.h> #include <util/delay.h> #define BLUE_PB 1 #define BLUE_PWM OCR1A #define ORANGE_PB 2 #define ORANGE_PWM OCR1B #define GREEN_PB 3 #define GREEN_PWM OCR2 void pin_init(void) { DDRB |= (1<<BLUE_PB) | (1<<ORANGE_PB) | (1<<GREEN_PB); PORTB &= ~((1<<BLUE_PB) | (1<<ORANGE_PB) | (1<<GREEN_PB)); } void timer1_init(void) { TCCR1A |= (1 << COM1A1) | (1 << WGM11); TCCR1B |= (1 << WGM13) | (1 << WGM12) | (1 << CS10); TCNT1 = 0x00; ICR1 = 0xFF; OCR1A = 0x00; } int main(void) { pin_init(); timer1_init(); while(1) { BLUE_PWM = 250; _delay_ms(1000); BLUE_PWM = 50; _delay_ms(1000); } }
То что программа делает хорошо видно в функции main(). С периодичностью в 1000мс она изменяет яркость светодиода:
Теперь давайте подробно разберемся с настройкой таймера.
Настройка таймера
Вся программа сводится к тому, что необходимо правильно настроить таймер, а затем остается просто в правильный регистр записывать требуемое значение скважности сигнала. После этого вам уже не надо будет думать о том, как работать с выходом — управление им берет на себя модуль таймера.
Таймеры в микроконтроллерах — очень мощный инструмент. Сейчас мы остановимся только на том, как сконфигурировать их на генерирование ШИМ-сигнала. Более подробно о работе с таймерами мы расскажем в следующих статьях. Исчерпывающую информацию о работе таймеров можно получить из даташита.
Вернемся к нашей программе. В ней первым делом настраиваются сразу все нужные выводы на выход, а затем происходит инициализация таймера. По порядку рассмотрим в каких регистрах и какие функции включены в нашей программе:
- Timer/Counter 1 Control Register A – TCCR1A. Бит COM1A1 это регистра отвечает за сброс таймера при совпадении. Бит WGM11 связан с битами WGM12 и WGM13 следующего регистра.
- Timer/Counter 1 Control Register B – TCCR1B. Биты WGM11, WGM12, WGM13, выставленные одновременно, переводят таймер в режим генерирования ШИМ-сигнала. Бит CS10 задает скорость счета таймера одновременно запускает таймер и задает делитель частоты тактового сигнала. Если не задать никакой делитель — таймер будет остановлен. С битом CS10 делитель будет равен единице, то есть таймер будет тактироваться от кварца.
- Timer/Counter 1 – TCNT1H и TCNT1L. В этих двух регистрах хранится состояние таймера. Именно в них с каждым «тиком» кварца увеличивается хранимое значение. Обнулим его, на всякий случай
- Input Capture Register 1 – ICR1H и ICR1L. Это период следования импульсов. То есть, когда содержимое регистра TCNT1 достигнет значения 0xFF начнется следующий период сигнала
- Output Compare Register 1A — OCR1AH и OCR1AL. Задает скважность. То есть пока в регистре TCNT1 значение меньше OCR1A, то на выводе «1», а после этого «0»
Все это гораздо проще понять по следующей картинке:
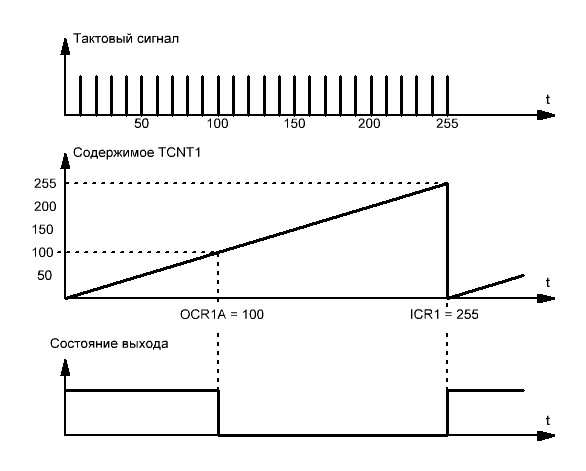
Диаграмма работы таймера
Мы предположим, в регистр OCR1A записано значение «100».
Тактовый сигнал у нас задан без делителя. Период следования тактовых импульсов 1/16МГц = 62,5нс. С каждым новым тактом, состояние регистра TCNT1 увеличивается на единицу. При это постоянно происходит его сравнение с регистрами OCR1A и ICR1. Как только он досчитывает до OCR1A происходит переключение состояния вывода из «1» в «0». При достижении значения ICR1 состояние TCNT1 сбрасывается в ноль, на выводе снова выставляется «1» и начинается следующий период сигнала.
Несложно посчитать период следования импульсов в нашем проекте: 255*62,5 = 15937,5нс. Примерно 16мкс. Частота при этом 62,5кГц. Это очень большая частота и снизить ее можно увеличив делитель или/и значение ICR1.
В итоге, чтобы изменить скважность сигнала остается только записать новое значение в регистр OCR1. Мы переопределили его директивой
#define BLUE_PWM OCR1A
В бесконечном цикле программа именно это и происходит: устанавливаем относительную скважность 200, ждем 1с, скважность 50, ждем 1с. Осталось только самое простое — понять на каком выводе будет этот сигнал. Изменить это нельзя и формироваться он будет на выводе OC1A, который в микроконтроллере Atmega8 подключен к 13му пину PB1 (или D9 выводу Arduino).
Третий пример
Всего в микроконтроллере Atmega8 два аппаратных таймера — 16ти-битный и 8ми-битный. Причем в первом есть сразу два модуля сравнения и он может формировать одновременно два разных ШИМ-сигнала. Третий ШИМ-сигнал может быть сформирован при помощи второго таймера. То есть всего на трех выводах может быть сгенерирован аппаратный ШИМ. Это выводы МК PB1, PB2 и PB3. Именно этим обусловлены ограничения функции Arduino analogWrite().
В этом разделе настроим еще два канала и будем управлять остальными светодиодами.
Для этого потребуется только дополнительно выставить бит COM1B1 и начать управлять регистром OCR1B. На эти действия будет реагировать оранжевый светодиод, подключенный к выводу PB2.
Для использования третьего канала придется вставить дополнительную функцию timer2_init() для запуска второго таймера.
#define F_CPU 16000000UL //16MHz #include <avr/io.h> #include <util/delay.h> #define BLUE_PB 1 #define BLUE_PWM OCR1A #define ORANGE_PB 2 #define ORANGE_PWM OCR1B #define GREEN_PB 3 #define GREEN_PWM OCR2 void pin_init(void) { DDRB |= (1<<BLUE_PB) | (1<<ORANGE_PB) | (1<<GREEN_PB); PORTB &= ~((1<<BLUE_PB) | (1<<ORANGE_PB) | (1<<GREEN_PB)); } void timer1_init(void) { TCCR1A |= (1 << COM1A1) | (1 << COM1B1) | (1 << WGM11); TCCR1B |= (1 << WGM13) | (1 << WGM12) | (1 << CS10); TCNT1 = 0x00; ICR1 = 0xFF; OCR1A = 0x00; OCR1B = 0x00; } void timer2_init(void) { TCCR2 |= (1 << COM21) | (1 << WGM21) | (1 << WGM20) | (1 << CS20); TCNT2 = 0x00; OCR2 = 0x00; } int main(void) { pin_init(); timer1_init(); timer2_init(); while(1) { for (int i=0; i<256; i++) { BLUE_PWM = i; _delay_ms(10); } BLUE_PWM = 0; for (int i=0; i<256; i++) { ORANGE_PWM = i; _delay_ms(10); } ORANGE_PWM = 0; for (int i=0; i<256; i++) { GREEN_PWM = i; _delay_ms(10); } GREEN_PWM = 0; } }
Второй таймер имеет гораздо меньше функций и настраивать его проще. Бит COM21 выводит сигнал на ногу. Биты WGM21 и WGM20 переводят таймер в режим формирования ШИМ. CS20 задает делатель тактового сигнала, равный нулю. Как видите, тут изменять частоту получится только при помощи делителя.
Вот видео работы этого примера:
ШИМ. Мигаем светодиодом плавно
Сегодня мы изучим возможность использования широтно-импульсной модуляции в микроконтроллере AVR, или, как говорят в народе, ШИМ.
В технической документации мы будем видеть чаще аббревиатуру PWM или pulse-width modulation, что преводится имено также.
Что же такое вообще широтно-импульсная модуляция.
ШИМ — это управление свечением светодиодов, вращением двигателей, и прочими устройствами необычным способом, при котором данное управление осуществляется не приложенным напряжением к контактам, а квадратными импульсами. При этом напряжение будет только двух видов — высокое (1) и низкое (0). При данном способе результирующее напряжение вычисляется как среднее по времени между временем высокого состояния в одном импульсе и временем низкого состояния. Мы вычисляем отношение времени (или широты) высокого состояния к общему периоду импульса. Называем мы это скважностью импульса. То есть чем больше в периоде напряжение находилось в высоком состоянии, тем больше скважность, а, следовательно, тем больше и результирующее среднее напряжение. То есть, чтобы найти результирующее напряжение, нам необходимо и достаточно вычисленную скважность умножить на напряжение и разделить на 100, так как скважность как правило измеряется в процентах. Например, если у нас в квадратном импульсе широта логического нуля равна широте логической единицы, то скважность у нас будет 50 процентов, и, если напряжение будет 5 вольт, то среднее результирующее напряжение мы получим равное 2,5 вольт и т.д. Лучшую картину объяснения данной ситуации мы можем увидеть, посмотрев видеоурок, ссылка на который дана в конце данной статьи.
Это конечно очень упрощённое понятие ШИМ. Есть более серьёзные разъяснение данной технологии, но нам для наших экспериментов этого будет вполне достаточно.
То есть, подведя итоги объяснению, мы управляем результирующим напряжением, а также и свечением светодиода, угловой скоростью электродвигателя и прочими значениями за счёт изменения скважности импульсов.
Но всё-таки самое интересное, как же всё-таки всё это организовано в нашем микроконтроллере?
В микроконтроллере AVR широтно-импульсную модуляцию можно организовать как программно, так и аппаратно.
Программная организация ШИМ — это когда мы включим на определённое время на ножке контроллера логическую единицу, а затем на определённое время — логический ноль и так по циклу. Плюсы данного способа — это то, что мы можем организовать ШИМ на абсолютно любой ножке любого порта контроллера, а минусом — то, что всё это будет связано с немалыми затратами на процессорное время, и возможно даже будет сопряжено с какими-то ошибками, вытекающими из этого.
Поэтому всегда в любой технологии мы стараемся придерживаться всё-таки именно аппаратного способа реализации.
Аппаратная организация ШИМ в МК AVR происходит на уровне таймера 2.
Как мы помним из предыдущего занятия, таймеров в конкретном нашем микроконтроллере Atmega8 три. И таймеры 0 и 2 являются восьмибитными. Но на уровне 2-го таймера как раз и организована широтно-импульсная модуляция.
Давайте посмотрим вот такую вот картину
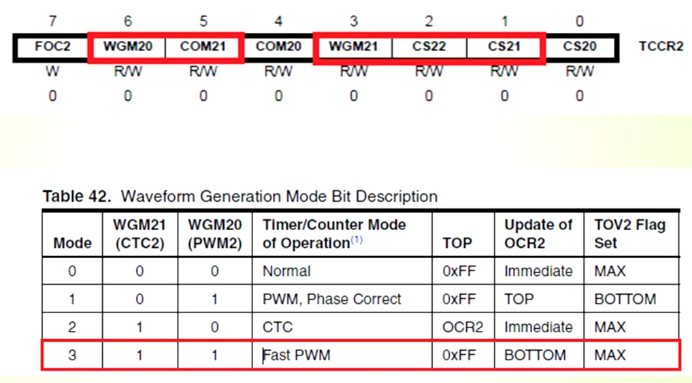
Здесь иллюстрируется то, какие мы должны включить биты в регистре TCCR второго таймера, чтобы запустить широтно-импульсную модуляцию.
Биты WGM как раз и включают таймер в резим PWM (ШИМ). С остальными битами разберёмся позже, если это потребуется.
А сейчас, чтобы это всё прочувствовать, нам необходим проект, который мы и создадим сейчас.
Проект создаем таким же образом, как и на прошлых занятиях. Назовём его Test10, создадим и добавим файлы PWM.c и PWM.h, последний автоматически оформится при создании соответствующими директивами прероцессора. А в главном файле Test01.c мы напишем стандартный код
#include «main.h»
//—————————————-
void port_ini(void)
{
PORTB=0x00;
DDRB=0x08;
}
//—————————————-
int main(void)
{
port_ini();
while(1)
{
}
}
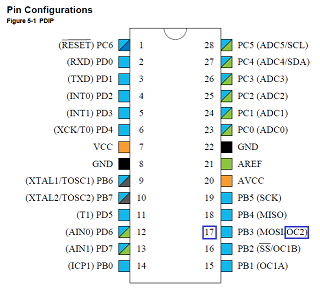
Как мы видим в коде, в порте B мы включили на выход 3 ножку. В распиновке контроллера мы видим, что у данной ножки есть ещё альтернативное обозначение OC2, которое и означает возможность этой ножки работать непосредственно с ШИМ
Файл main.h мы можем даже подключить с прошлого занятия по LCD и немного исправим код, подключив туда уже новый наш модуль PWM
#ifndef MAIN_H_
#define MAIN_H_
#define F_CPU 8000000UL
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include <stdio.h>
#include <stdlib.h>
#include «PWM.h»
#endif /* MAIN_H_ */
Ну и теперь начнём писать код в новую библиотеку для работы непосредственно с ШИМ — в файл PWM.c.
Там мы также подключим заголовочный файл и создадим каркас функции для работы с ШИМ
#include «PWM.h»
void init_PWM_timer(void)
{
}
А в заголовочный файл нашей библиотеки мы добавим прототип данной функции, а также подключим библиотеку для работы с прерываниями
#ifndef PWM_H_
#define PWM_H_
#include <avr/interrupt.h>
void init_PWM_timer(void);
#endif /* PWM_H_ */
И вызовем сразу эту функцию в main()
port_ini();
init_PWM_timer();
Начнём теперь писать код непосредственно в функцию. Сначала запишем все нули в регистр ASSR, который существует у таймера, но мы его никак не используем
void init_PWM_timer(void)
{
ASSR=0x00;
Дальше уже займёмся управляющим регистром нашего таймера. Назначение битов WGM и то, какие именно из них мы включим, мы разобрали. Теперь биты COM20 и COM21, отвечающие за режим самого ШИМ. Мы выберем вот такой режим и соответственно ему и включим данные биты
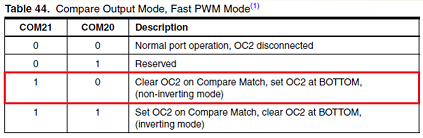
А включим мы режим, при котором при начале счёта напряжение на ножке OC2 будет находиться в высоком логическом состоянии, а как только мы досчитаем до определённой цифры, то ножка перейдёт в низкое состояние и будет в нём находиться до окончания счёта. И так по кругу.
И останется нам только настроить делитель. Слишком большая частота нам не нужна. Но когда была слишком маленькая, также было заметно мерцание, поэтому давайте включим следующую величину
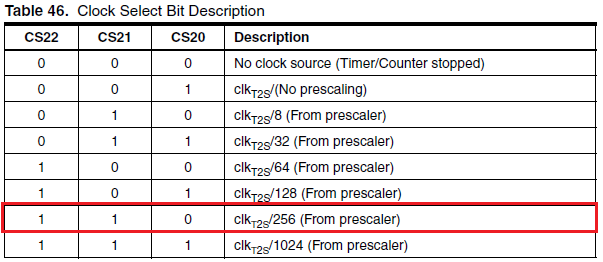
Поэтому мы включим все три бита.
В итоге значение регистра станет вот таким
ASSR=0x00;
TCCR2=0b01101110; //Fast PWM, Clear OC2 on Compare Match, clkT2S/256 (From prescaler) (реальная частота получится 8мгц/256 = 31250 гц)
ATmega8: ШИМ на 8-битном таймере и программное управление компьютерным вентилятором
разделы: AVR , дата: 14 ноября 2015г.

6000 в/м
ШИМ штука не сложная, по крайней мере, не сложнее чем мигание светодиодом. Принцип тот же: включаешь — выключаешь, и никаких сложных протоколов с контрольными суммами. В июле у меня был пост про таймер в CTC режиме, там если в прерывании начать переключать GPIO то получится вполне полноценный ШИМ. Такой способ хорош тем, что в ШИМ можно превратить любой свободный пин GPIO. Тогда получается, что частота ШИМ будет равна частоте переполнения счетчика, т.е. для 8-битного таймера: (частота кварца)/(предделитель_таймера * 256). Вобще-то, если ШИМ делать вручную, то частоту можно повысить, если в качестве значения таймера брать остаток от деления, но тогда и разрядность ШИМ соответственно понизится. Пример для двухкратного увеличения: (2 % 127)== (129 % 127) == 2.
Однако, есть в AVR аппаратные ШИМ когда все обходится без прерываний, и работает все с двух строчек кода. Называется он Fast PWM.
Для его настойки пондобится лишь контрольный регистр таймера TCCR2:

В нем нужно будет выставить биты WGM20 и WGM21:

Частоту по собственному вкусу:

и режим OC2 пина: выключено, нормальный режим, инверсный

и еще… нужно включить пин в push-pull режиме.
Простой код для проверки работы ШИМ
#include <util/delay.h> #include <uart.h> #include <avr/io.h> static FILE mystdout = FDEV_SETUP_STREAM(uart_putchar, NULL, _FDEV_SETUP_WRITE); int main(void) { //—- init init_uart(); DDRB |= (1<<PB5); // led indicator // init 8-bit timer in Fast PWM mode TCCR2 = (1<<WGM21)|(1<<WGM20)|(1<<COM21)|(1<<CS21); // fastPWM; frequent = 1/(256*8); non-inverting mode //—- ready indication blink13(3); stdout = &mystdout; printf(«Ok, I’m ready!\n»); //—- main body uint8_t pwm; pwm=0; DDRB |=(1<<PB3); for (;;) { _delay_ms(2000); pwm+=10; OCR2=pwm; printf(«PWM value: %u\n», pwm); }; return 0; }
Самым простым способом проверить ШИМ является подключение светодиода с резистором. Самым простым способом подключить вентилятор — использовать биполярный транзистор. Я подключал по схеме взятой отсюда
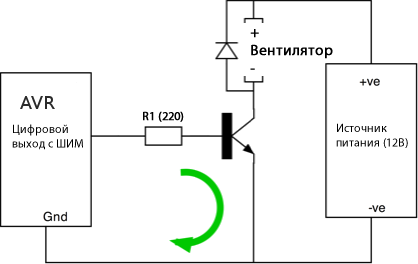
Хотя, использовать можно и что-то вроде H-моста




Добавить комментарий