
Ir2110 описание на русском
Содержание
- Ключ на плечо! – особенности применения высоковольтных драйверов производства IR
- Типы драйверов компании IR
- Драйверы полумостов
- Трехфазные драйверы
- Драйверы измерения тока
- Расчет параметров цепи вольтодобавки (bootstrap)
- Борьба с отрицательными выбросами в цепи Vs
- Использование драйвера ключей нижнего и верхнего уровней IR2110 — объяснение и примеры схем
- Устройство и работа портов ввода-вывода микроконтроллеров AVR. Часть 3
Ключ на плечо! – особенности применения высоковольтных драйверов производства IR
От надежной работы выходных каскадов силовых электронных устройств зависит, в конечном итоге, работа всей производственной линии, где эти устройства применяются. Для надежного и качественного переключения управляющих силовых ключей — высоковольтных MOSFET- и IGBT-транзисторов — необходимо обеспечить выполнение ряда условий:
1) напряжение на затворе должно быть выше напряжения истока транзистора на 5…10 В для MOSFET и 10…15 В для IGBT. Задача усложняется тем, что в высоковольтной системе напряжение истока (т.е. в основной шине устройства) может достигать нескольких сот или тысяч вольт;
2) транзистор в составе системы должен иметь возможность прямого управления от логической низковольтной части системы, обычно измеряемого относительно общей шины. Таким образом, напряжение низковольтной части должно иметь смещение относительно источника питания высоковольтной части системы, которое, в свою очередь, часто является двуполярным;
3) мощность, потребляемая схемой управления затвором, не должна существенно влиять на общую производительность системы коммутации.
Основной задачей драйвера для обеспечения указанных выше требований является преобразование уровней напряжения и согласование низковольтной части системы управления, имеющей, как правило, однополярное питание, и высоковольтной части, к которой часто приложено двуполярное напряжение с высоким потенциалом.
Второй задачей, решаемой с помощью специализированных драйверов, является обеспечение высоких значений токов затвора, переключающих силовые транзисторы. Дело в том, что высоковольтные силовые ключи, как правило, имеют значительные паразитные емкости, способные накапливать большие заряды в области затвора. Для полноценного переключения таких транзисторов этот заряд необходимо рассосать или накачать, что и обеспечивается с помощью больших выходных токов драйвера.
Кроме того, драйверы силовых ключей, в отличие от простых преобразователей уровня, снабжены множественными механизмами защиты как самого драйвера, так и управляемых ключей, что позволяет выполнять формирование выходных управляющих сигналов согласно определенным алгоритмам, чтобы предотвратить выход системы из строя в аварийной ситуации.
Интегральные драйверы, производимые компанией International Rectifier, предоставляют широкий набор функций, необходимых для управления силовыми MOSFET- или IGBT-ключами.
Типы драйверов компании IR
В зависимости от функциональной насыщенности и выполняемых функций, изделия компании International Rectifier можно разделить на несколько типов:
- драйверы нижнего и драйверы верхнего ключа;
- драйверы, совмещающие управление верхним и нижним ключом;
- полумостовые драйверы;
- трехфазные драйверы.
Познакомимся подробнее с типами драйверов и особенностями их применения.
В зависимости от базового включения силового транзистора в систему, он является верхним или нижним ключом. На рисунке 1 представлена схема, в которой силовой транзистор является верхним ключом. Если нагрузка включена между плюсом силовой шины и стоком силового транзистора, подключенного истоком к общей шине, то в такой схеме транзистор будет являться силовым нижним ключом.
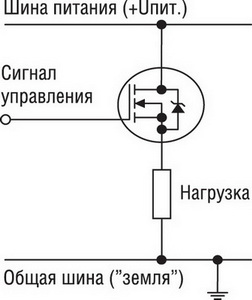
Рис. 1. Пример схемы включения силового транзистора в качестве верхнего ключа
Компания International Rectifier выпускает такие драйверы в одноканальном и двуканальном исполнении, с различными значениями выходных токов (до 4 А) и вариантами конфигураций инвертированных входов. Перечень доступных микросхем представлен в таблице 1.
Таблица 1. Микросхемы драйверов верхнего/нижнего ключей
Следует отметить, что любой драйвер верхнего ключа может быть использован в качестве драйвера нижнего ключа, если применение доступных драйверов нижнего ключа не может обеспечить требуемых рабочих характеристик системы.
Драйверы полумостов
Большинство микросхем из номенклатуры драйверов компании International Rectifier содержат в одном корпусе два выходных канала для управления верхним и нижним ключом. Эти драйверы управляют входными каналами независимо, что может быть использовано для одновременного открытия обоих ключей, или зависимо — это подразумевает невозможность одновременного открытия ключей (даже на короткий период за счет встраиваемой паузы между переключением ключей — так называемый Dead-Time (DT)), что обеспечивает принципиальное отсутствие сквозного тока через ключи. Во втором случае драйверы носят название полумостового драйвера (Half-Bridge driver).
Механизм встроенного временного промежутка Dead-Time обеспечивает гарантированное закрытие одного силового ключа до момента начала открытия ключа в противоположном плече. Гарантией надежного закрытия противоположного транзистора является встроенная схема, контролирующая состояние ключей, и наличие схемы задержки, формирующей промежуток времени, в течение которого закрыты оба транзистора в плечах полумоста.
Большинство драйверов обоих типов имеет структуру, представленную на рисунке 2 на примере структурной схемы драйвера IRS2110.
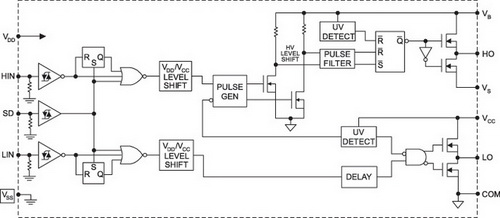
Рис. 2. Внутренняя структурная схема драйвера IRS2110
Как видно из рисунка 2, сигналы управления верхним и нижним ключами поступают через соответствующие входы Hin и Lin на триггеры Шмитта, затем через элемент «3ИЛИ-НЕ» — на преобразователи уровня и формирователи ШИМ. Благодаря наличию элементов логического «ИЛИ» существует возможность заблокировать работу драйвера с помощью входного сигнала (Shut-Down), а имеющиеся на входе элементов RS-триггеры исключают неопределенное состояние входов после подачи напряжения питания на устройство.
Входные сигналы совместимы по уровням с сигналами микросхем, выполненных по стандартам технологии ТТЛ/КМОП. Некоторые драйверы интерпретируют как логическую единицу входной сигнал, уровень которого составляет не менее 10% от напряжения питания драйвера (например, IRS211x). Другие драйверы (например, серий IRS210x, IRS212x и IRS213x) имеют фиксированный диапазон напряжений, соответствующий переходному состоянию между логическими уровнями. Для указанных типов драйверов он соответствует интервалу 1,5…2 В.
Микросхемы обеспечивают одинаковую временную задержку прохождения сигнала для обоих каналов и имеют дополнительный функционал — возможность перехода в неактивное состояние (при наличии входа SD), разделение силовой и сигнальной «земель», ограничение максимального рабочего тока транзисторов и т.п. Типовые схемы включения драйверов представлены на рисунке 3.
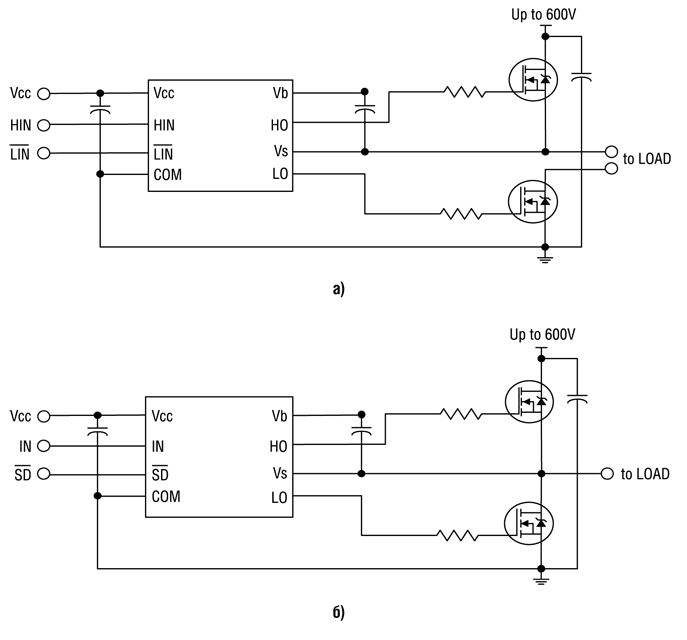
Рис. 3. Типовые схемы включения полумостовых драйверов: без Dead-Time (а) и с Dead-Time (б)
Номенклатура полумостовых драйверов в портфеле IR очень широка. В следующих сводных таблицах 2 и 3 приводится информация о микросхемах, представляющих наибольший интерес для пользователя.
Таблица 2. Полумостовые драйверы без встроенной функции Dead-Time
Таблица 3. Полноценные полумостовые драйверы (с Dead-Time)
Трехфазные драйверы
Для управления электродвигателями часто применяются трехфазные системы электропривода. Естественно, такую систему управления силовыми транзисторами можно реализовать с помощью трех полумостовых драйверов. Но, при всей своей очевидности, данное решение получается довольно габаритным, различие значений некоторых параметров драйверов разных фаз может приводить к «перекосам» системы, снижению эффективности управления и понижению общего КПД системы.
Поэтому компания IR предлагает готовые решения данной задачи, реализованные в виде трехфазных драйверов. Наиболее интересным примером такого драйвера является микросхема IRS26302D, представленная на рисунке 4. Драйвер имеет семь выходных каналов, управляемых независимыми входами. Шесть каналов используются для построения самого трехфазного моста, а седьмой канал может применяться для реализации корректора коэффициента мощности (ККМ) или системы защиты и рекуперации.
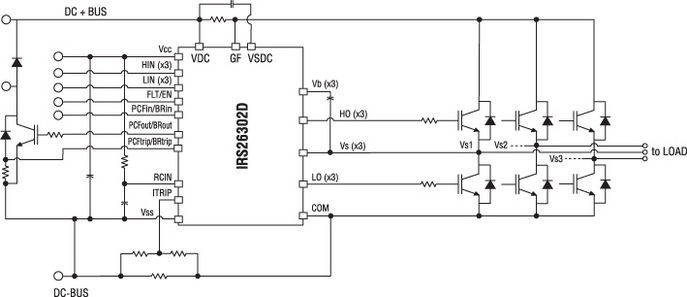
Рис. 4. Типовая схема включения семиканального трехфазного драйвера
Если с функционалом ККМ вопросов у читателя, вероятно, не возникнет, то описание работы системы защиты может быть полезным. Итак, при управлении мощным мотором с высокой механической инерционностью, при снятии управляющих воздействий с драйвера (для остановки мотора) мотор может продолжить свое вращение по инерции, выполняя тем самым роль генератора электроэнергии — потенциал силовой шины системы начнет повышаться. Если мотор достаточно мощный, то напряжение может вырасти настолько, что превысит все допустимые уровни рабочих напряжений как драйвера, так и транзисторов моста, что приведет к их пробою и выходу из строя. Для предотвращения такой ситуации может использоваться дополнительный седьмой канал драйвера. Микросхема постоянно отслеживает значение тока на силовой шине с помощью токоизмерительного резистора, и в момент, когда будет детектирован большой обратный ток в шине (ситуация генерации электроэнергии мотором), транзистор, управляемый седьмым каналом, откроется и начнет «сливать» избыточную мощность на защитном диоде (или резисторной сборке). Если же вместо пассивного сжигания энергии в резисторном модуле в виде тепла использовать рекуператор, включенный в цепь вместо этих резисторов, то можно запасать избыточную энергию в аккумуляторных батареях для ее последующего использования (например, при работе двигателя на повышенной нагрузке).
Естественно, одной этой микросхемой семейство трехфазных драйверов, производимых компанией IR, не исчерпывается. Более полный перечень микросхем с указанием их ключевых параметров приводится в таблице 4.
Таблица 4. Трехфазные драйверы и их ключевые параметры
Драйверы измерения тока
При использовании вышеуказанных интегральных драйверов остается открытым вопрос о контроле тока, потребляемого нагрузкой. Если интегральная микросхема драйвера имеет функцию контроля тока, то, как правило, она просто сообщает о возникновении неисправности, используя дополнительный выход сигнализации об ошибке, никак не расшифровывая причину ее возникновения. Одной из причин аварийной ситуации может быть перегрузка по току выходного каскада.
Для контроля тока, потребляемого нагрузкой, компания International Rectifier выпускает интегральные микросхемы, позволяющие реализовать данную функцию. На рисунке 5 приведены схемы контроля тока, потребляемого нагрузкой, на микросхеме, совмещенной с драйвером (а), и специализированной микросхеме измерения тока (б).
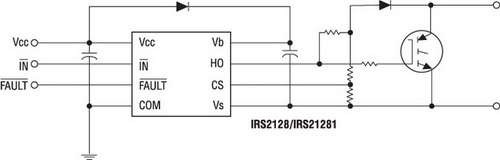
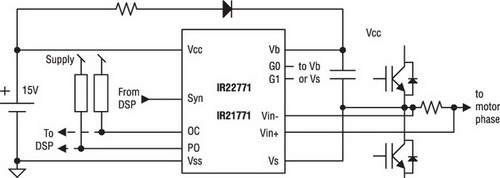
Рис. 5. Примеры включения драйверов, контролирующих ток в нагрузке
Микросхемы IR22771 широко применяются при управлении двигателями и включаются индивидуально в каждую фазу. Микросхема не является драйвером в классическом смысле, т.к. не управляет выходными транзисторами, а только обеспечивает измерение тока и вырабатывает управляющие воздействия для центрального управляющего узла (чаще всего — DSP-контроллера).
Расчет параметров цепи вольтодобавки (bootstrap)
Для стабильной работы любой коммутационной схемы важен правильный выбор необходимых элементов обвязки. Для драйверов верхнего плеча и любого типа драйверов полумостов одной из важнейших внешних цепей является цепь вольтодобавки, элементами которой являются диод и конденсатор. Эти два элемента обеспечивают разность напряжения «затвор-исток», необходимую для гарантированного открывания внешнего выходного транзистора. Расположенные локально развязывающие конденсаторы на силовых и слаботочных шинах питания позволяют в значительной степени уменьшить уровень излучаемых помех, компенсируя индуктивность проводников.
Выбор номинального рабочего напряжения конденсатора вольтодобавки Cboot должен основываться на максимальном значении напряжения питания микросхемы Vcc. Емкость конденсатора выбирается, исходя из следующих параметров:
- требуемое напряжение для управления транзистором;
- максимальный сквозной ток IQBS для схем управления верхним ключом;
- токи цепей смещения в пределах драйвера;
- ток утечки «затвор-исток» IQBS транзистора;
- ток утечки самого конденсатора вольтодобавки.
Последнее условие актуально только для электролитических конденсаторов. При использовании конденсаторов других типов им можно пренебречь. Поэтому неэлектролитические конденсаторы более предпочтительны для применения в цепи вольтодобавки.
Минимальная емкость компенсационного конденсатора может быть вычислена по следующей формуле:
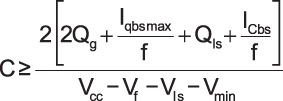
где:
Qg — заряд затвора МДП-транзистора верхнего ключа,
f — частота переключения ключа,
ICbs — ток утечки компенсирующего конденсатора,
Iqbs max — максимальный сквозной ток затвор-исток МДП-транзистора верхнего ключа,
Vcc — напряжение слаботочной, «цифровой» части схемы,
Vf — прямое падение напряжения на компенсационном диоде,
Vls — падение напряжения на нижнем ключе или на нагрузке,
Vmin — минимальное напряжение между шинами VB и VS (рисунок 2),
Qls — заряд, необходимый для создания смещения в каждом цикле переключения (обычно 5 нКл для драйверов, предназначенных для управления MOSFET с максимальным рабочим напряжением 500 В/600 В, и 20 нКл для драйверов, предназначенных для управления MOSFET на напряжение 1200 В).
Диод вольтодобавки должен выдерживать максимальное напряжение, существующее на силовой шине. Например, такая ситуация возникает, когда верхний ключ открыт, и к диоду оказывается приложено все напряжение шины. Значение прямого тока через диод зависит от частоты переключения силового ключа, то есть, от частоты заряда затворной емкости. Например, для транзистора IRF450, работающего на частоте 100 кГц, ток через диод составит примерно 12 мА.
Ток утечки при повышенной температуре для этого диода является важным критерием в приложениях, где конденсатор должен поддерживать заряд в течение длительного времени. Поэтому необходимо, чтобы этот диод быстро восстанавливался с целью уменьшения заряда, попадающего обратно в цепь питания с конденсатора вольтодобавки.
Борьба с отрицательными выбросами в цепи Vs
При работе с мощной индуктивной нагрузкой (мощные электродвигатели), а также при недостаточно грамотной трассировке выходного каскада мощных систем, на выходе системы можно столкнуться с высокоамплитудными выбросами обратной полярности. Описанная ситуация продемонстрирована на рисунке 6.

Рис. 6. Появление на выходе выброса обратной полярности
Почему возникает такая ситуация и чем она может быть опасна? Рассмотрим случай работы системы на индуктивную нагрузку: когда открыт верхний ключ, через нагрузку протекает некоторый ток. При закрытии верхнего ключа вплоть до момента открытия нижнего (Dead-Time) ток в индуктивную нагрузку продолжает течь через диод нижнего транзистора, т.к. ток через индуктивность не может скачком упасть до нуля. Исток нижнего транзистора подключен к общей шине «земля», а поскольку ток течет от точки с большим потенциалом к точке с меньшим, то получается, что выброс напряжения на линии Vs имеет обратную полярность (эпюра напряжения на линии Vs приведена на рисунке 6). Этот обратный выброс через внутреннюю структуру драйвера начинает перезаряжать емкости микросхемы, что может привести к ложному отпиранию верхнего ключа. А исходя из алгоритма управления, по прошествии интервала времени Dead-Time будет открыт нижний транзистор. В этом случае возникнет сквозной ток через оба плеча системы, что наверняка приведет к выходу системы из строя, а возможно, и к возгоранию элементов устройства. Опасность выбросов отрицательного напряжения значительно возрастает с увеличением площади кристалла силового транзистора и повышением плотности тока, коммутируемого транзистором в течение короткого времени.
Интегральные микросхемы-драйверы компании International Rectifier гарантированно выдерживают отрицательные выбросы на шине Vs как минимум, до -5 В относительно общего провода. В случае, если выброс превышает указанное значение, выход управления верхнего ключа временно блокируется в текущем состоянии. Оставаясь в пределах максимально допустимых значений для Vs, эта ситуация не вызывает повреждений интегральной микросхемы, тем не менее, выходной буферный каскад не будет реагировать на изменения входного сигнала до тех пор, пока отрицательный выброс не завершится.
Для оценки устойчивости схемотехнического решения к таким экстремальным ситуациям, как короткое замыкание нагрузки или перегрузка по току (в обоих случаях отношение di/dt ® max), необходимо отслеживать поведение сигналов в двух точках:
1) смещение верхнего ключа относительно общего провода Vs — COM;
2) величину напряжения «плавающего» источника питания Vb — Vs.
Измерения следует проводить непосредственно на выводах микросхемы драйвера для того, чтобы были отражены все параметры соединений, включая паразитные воздействия линий связи и взаимного размещения, как указано на рисунке 7.
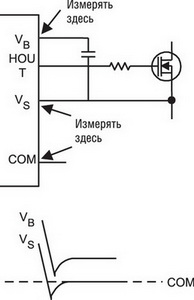
Рис. 7. Точки измерения критических параметров сигнала при возникновении отрицательных выбросов на шине Vs
Следующие мероприятия позволяют гарантировать стабильную работу системы, несмотря на воздействия импульсных помех.
1. Минимизация паразитных влияний:
а) использование коротких проводников максимально возможной толщины между ключами и драйвером, без петель и отклонений;
б) избегание пересечений трасс и межслойных переходов — они вносят дополнительно существенную паразитную индуктивность в цепь;
в) снижение индуктивности выводов электрорадиоэлементов за счет снижения высоты расположения их корпусов над поверхностью печатной платы;
г) размещение обоих ключей локализовано в «силовой» части в непосредственной близости от драйвера для максимального сокращения длины трасс.
2. Снижение воздействий на управляющую микросхему драйвера:
а) соединения цепей Vs и COM рекомендуется выполнять так, как изображено на рисунке 8;
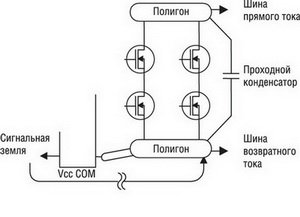
Рис. 8. Рекомендуемая топология соединений драйвера и силовых ключей
б) минимизация паразитных параметров цепей управления затворами транзисторов путем использования коротких трасс типа «точка-точка»;
в) следует размещать управляющую микросхему драйвера как можно ближе к силовым ключам с целью минимизации длины трасс.
3. Улучшение развязки:
а) увеличение емкости конденсатора вольтодобавки до величины более 0,47 мкФ наряду с использованием как минимум одного конденсатора с низким эквивалентным последовательным сопротивлением (ЭПС). Это уменьшит степень перезарядки конденсатора в результате значительного повышения Vs при выбросе напряжения;
б) использование второго конденсатора с низким ЭПС в качестве фильтрующего в цепях Vs и COM. Так как этот конденсатор будет обеспечивать поддержку обоих выходных буферов и перезарядку конденсатора Сboot, то его емкость должна быть как минимум в 10 раз больше емкости конденсатора вольтодобавки;
в) если требуется включение резистора последовательно с диодом вольтодобавки, то необходимо убедиться, что напряжение шины VB не будет опускаться ниже значения общего провода COM, особенно в момент включения и максимальных значений частоты и скважности.
Следование приведенным рекомендациям позволяет значительно сократить уровень помех, возникающих в результате отрицательных выбросов напряжения. Однако, если уровень выбросов остается достаточно велик, то может оказаться необходимым снижение скорости нарастания выходного напряжения dV/dt.
В дополнение к приведенным выше рекомендациям, в целях повышения устойчивости микросхем драйверов компанией International Rectifier разработана технология повышения стойкости драйверов к отрицательным выбросам напряжения (NTSOA — Negative Transient Safe Operation Area). На рисунке 9 приведена диаграмма допустимых мощностей импульсов выбросов отрицательного напряжения, для которых компания IR гарантирует сохранение работоспособности микросхемы драйвера.
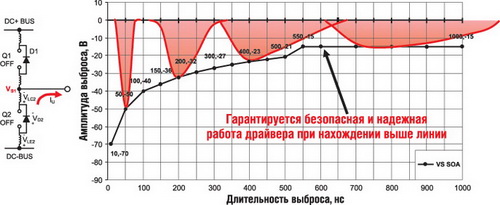
Рис. 9. Область безопасной работы драйверов IR при появлении выбросов обратной полярности
Устойчивость к выбросам отрицательного напряжения является определяющим фактором при выборе управляющей микросхемы драйвера.
Как следует из статьи, выбор драйвера для коммутации силовых MOSFET или IGBT не является трудной задачей. Достаточно определить требуемые энергетические показатели разрабатываемой системы и выбрать ее топологию. Следование указаниям по схемотехнике и топологии, приводимым в документации на микросхему и рекомендациях по применению, избавит от проблем, возникающих при работе системы. Современные интегральные драйверы компании International Rectifier 5-го поколения имеют защитные цепи и не подвержены выходу из строя при возникновении кратковременных выбросов отрицательного напряжения.
Широкая номенклатура изделий International Rectifier и их высокое качество позволяют построить надежную силовую систему любого уровня сложности с минимальными затратами как на этапе проектирования схемотехники, так и на этапе изготовления конечного устройства.
Использование драйвера ключей нижнего и верхнего уровней IR2110 — объяснение и примеры схем

Быть может, после прочтения этой статьи вам не придётся ставить такие же по размерам радиаторы на транзисторы.
Перевод этой статьи.
Небольшое обращение от переводчика:Во-первых, в данном переводе могут быть серьёзные проблемы с переводом терминов, я не занимался электротехникой и схемотехникой достаточно, но всё же что-то знаю; также я пытался перевести всё максимально понятно, поэтому не использовал такие понятия, как бутсрепный, МОП-транзистор и т.п. Во-вторых, если орфографически сейчас уже сложно сделать ошибку (хвала текстовым процессорам с указанием ошибок), то ошибку в пунктуации сделать довольно-таки просто.
И вот по этим двум пунктам прошу пинать меня в комментариях как можно сильнее.
Теперь поговорим уже больше о теме статьи — при всём многообразии статей о построении различных транспортных средств наземного вида (машинок) на МК, на Arduino, на <вставить название>, само проектирование схемы, а тем более схемы подключения двигателя не описывается достаточно подробно. Обычно это выглядит так:
— берём двигатель
— берём компоненты
— подсоединяем компоненты и двигатель
— …
— PROFIT!1!
Но для построения более сложных схем, чем для простого кручения моторчика с ШИМ в одну сторону через L239x, обычно требуется знание о полных мостах (или H-мостах), о полевых транзисторах (или MOSFET), ну и о драйверах для них. Если ничто не ограничивает, то можно использовать для полного моста p-канальные и n-канальные транзисторы, но если двигатель достаточно мощный, то p-канальные транзисторы придётся сначала обвешивать большим количеством радиаторов, потом добавлять кулеры, ну а если совсем их жалко выкидывать, то можно попробовать и другие виды охлаждения, либо просто использовать в схеме лишь n-канальные транзисторы. Но с n-канальными транзисторами есть небольшая проблема — открыть их «по-хорошему» подчас бывает довольно сложно.
Поэтому я искал что-нибудь, что мне поможет с составлением правильной схемы, и я нашёл статью в блоге одного молодого человека, которого зовут Syed Tahmid Mahbub. Этой статьёй я и решил поделится.
Во многих ситуациях мы должны использовать полевые транзисторы как ключи верхнего уровня. Также во многих ситуациях мы должны использовать полевые транзисторы как ключи как и верхнего, так и нижнего уровней. Например, в мостовых схемах. В неполных мостовых схемах у нас есть 1 MOSFET верхнего уровня и 1 MOSFET нижнего уровня. В полных мостовых схемах мы имеем 2 MOSFETа верхнего уровня и 2 MOSFETа нижнего уровня. В таких ситуациях нам понадобится использовать драйвера как высокого, так и низкого уровней вместе. Наиболее распространённым способом управления полевыми транзисторами в таких случаях является использование драйвера ключей нижнего и верхнего уровней для MOSFET. Несомненно, самым популярным микросхемой-драйвером является IR2110. И в этой статье/учебнике я буду говорить о именно о нём.
Вы можете загрузить документацию для IR2110 с сайта IR. Вот ссылка для загрузки: http://www.irf.com/product-info/datasheets/data/ir2110.pdf
Давайте для начала взглянем на блок-схему, а также описание и расположение контактов: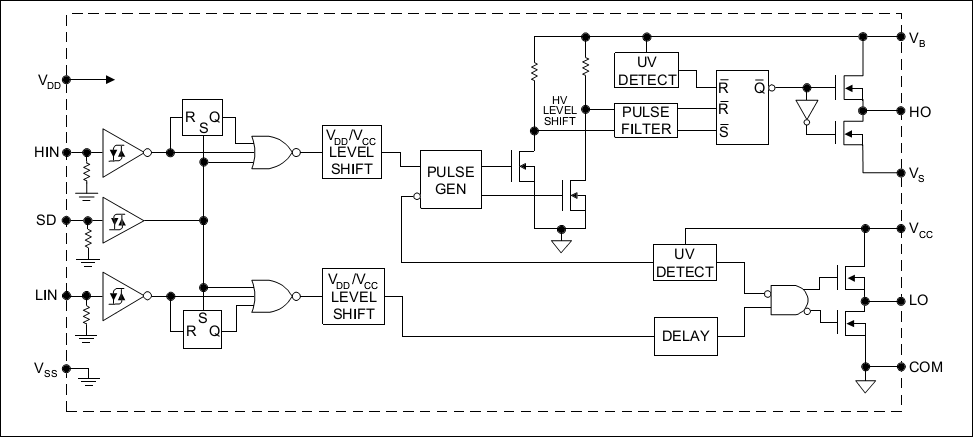
Рисунок 1 — Функциональная блок-схема IR2110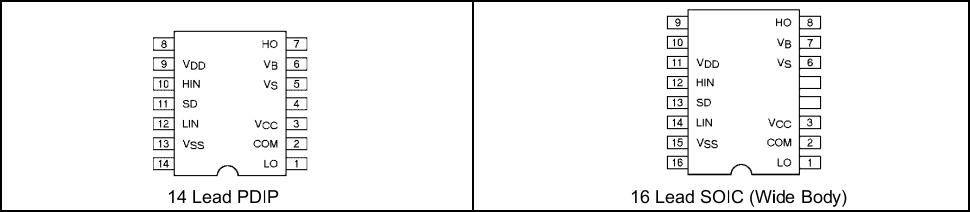
Рисунок 2 — Распиновка IR2110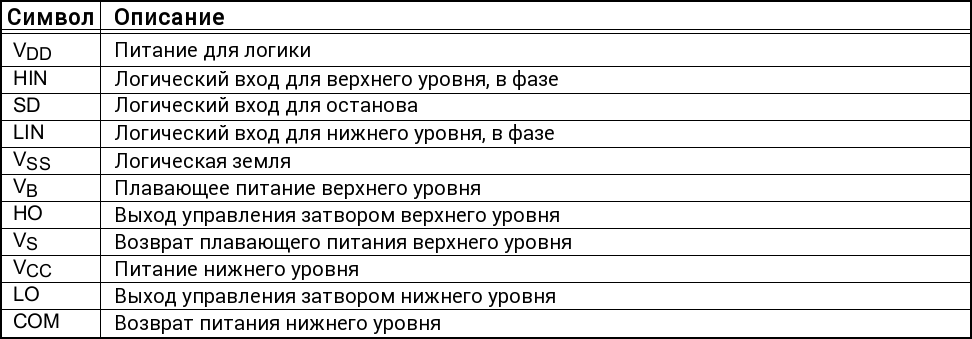
Рисунок 3 — Описание пинов IR2110
Также стоит упомянуть, что IR2110 выпускается в двух корпусах — в виде 14-контактного PDIP для выводного монтажа и 16-контактного SOIC для поверхностного монтажа.
Теперь поговорим о различных контактах.
VCC — это питание нижнего уровня, должно быть между 10В и 20В. VDD — это логическое питание для IR2110, оно должно быть между +3В и +20В (по отношению к VSS). Фактическое напряжение, которое вы выберете для использования, зависит от уровня напряжения входных сигналов. Вот график: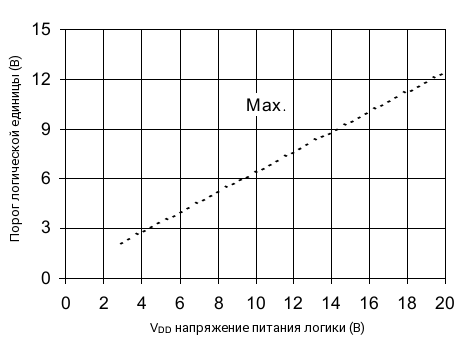
Рисунок 4 — Зависимость логической 1 от питания
Обычно используется VDD равное +5В. При VDD = +5В, входной порог логической 1 немного выше, чем 3В. Таким образом, когда напряжение VDD = +5В, IR2110 может быть использован для управления нагрузкой, когда вход «1» выше, чем 3 (сколько-то) вольт. Это означает, что IR2110 может быть использован почти для всех схем, так как большинство схем, как правило, имеют питание примерно 5В. Когда вы используете микроконтроллеры, выходное напряжение будет выше, чем 4В (ведь микроконтроллер довольно часто имеет VDD = +5В). Когда используется SG3525 или TL494 или другой ШИМ-контроллер, то, вероятно, придётся их запитывать напряжением большим, чем 10В, значит на выходах будет больше, чем 8В, при логической единице. Таким образом, IR2110 может быть использован практически везде.
Вы также можете снизить VDD примерно до +4В, если используете микроконтроллер или любой чип, который даёт на выходе 3.3В (например, dsPIC33). При проектировании схем с IR2110, я заметил, что иногда схема не работает должным образом, когда VDD у IR2110 был выбран менее + 4В. Поэтому я не рекомендую использовать VDD ниже +4В. В большинстве моих схем уровни сигнала не имеют напряжение меньше, чем 4В как «1», и поэтому я использую VDD = +5V.
Если по каким-либо причинам в схеме уровень сигнала логической «1» имеет напряжение меньшее, чем 3В, то вам нужно использовать преобразователь уровней/транслятор уровней, он будет поднимать напряжение до приемлемых пределов. В таких ситуациях я рекомендую повышение до 4В или 5В и использование у IR2110 VDD = +5В.
Теперь давайте поговорим о VSS и COM. VSS это земля для логики. COM это «возврат низкого уровня» — в основном, заземление низкого уровня драйвера. Это может выглядеть так, что они являются независимыми, и можно подумать что, пожалуй, было бы возможно изолировать выходы драйвера и сигнальную логику драйвера. Тем не менее, это было бы неправильно. Несмотря на то что внутренне они не связаны, IR2110 является неизолированным драйвером, и это означает, что VSS и COM должны быть оба подключены к земле.
HIN и LIN это логические входы. Высокий сигнал на HIN означает, что мы хотим управлять верхним ключом, то есть на HO осуществляется вывод высокого уровня. Низкий сигнал на HIN означает, что мы хотим отключить MOSFET верхнего уровня, то есть на HO осуществляется вывод низкого уровня. Выход в HO, высокий или низкий, считается не по отношению к земле, а по отношению к VS. Мы скоро увидим, как усилительные схемы (диод + конденсатор), используя VCC, VB и VS, обеспечивают плавающее питания для управления MOSFETом. VS это плавающий возврат питания. При высоком уровне, уровень на HO равен уровню на VB, по отношению к VS. При низком уровне, уровень на HO равнен VS, по отношению к VS, фактически нулю.
Высокий сигнал LIN означает, что мы хотим управлять нижним ключом, то есть на LO осуществляется вывод высокого уровня. Низкий сигнал LIN означает, что мы хотим отключить MOSFET нижнего уровня, то есть на LO осуществляется вывод низкого уровня. Выход в LO считается относительно земли. Когда сигнал высокий, уровень в LO такой же как и в VCC, относительно VSS, фактически земля. Когда сигнал низкий, уровень в LO такой же как и в VSS, относительно VSS, фактически нуль.
SD используется в качестве контроля останова. Когда уровень низкий, IR2110 включен — функция останова отключена. Когда этот вывод является высоким, выходы выключены, отключая управление IR2110.
Теперь давайте взглянем на частые конфигурации с IR2110 для управления MOSFETами как верхних и нижних ключей — на полумостовые схемы.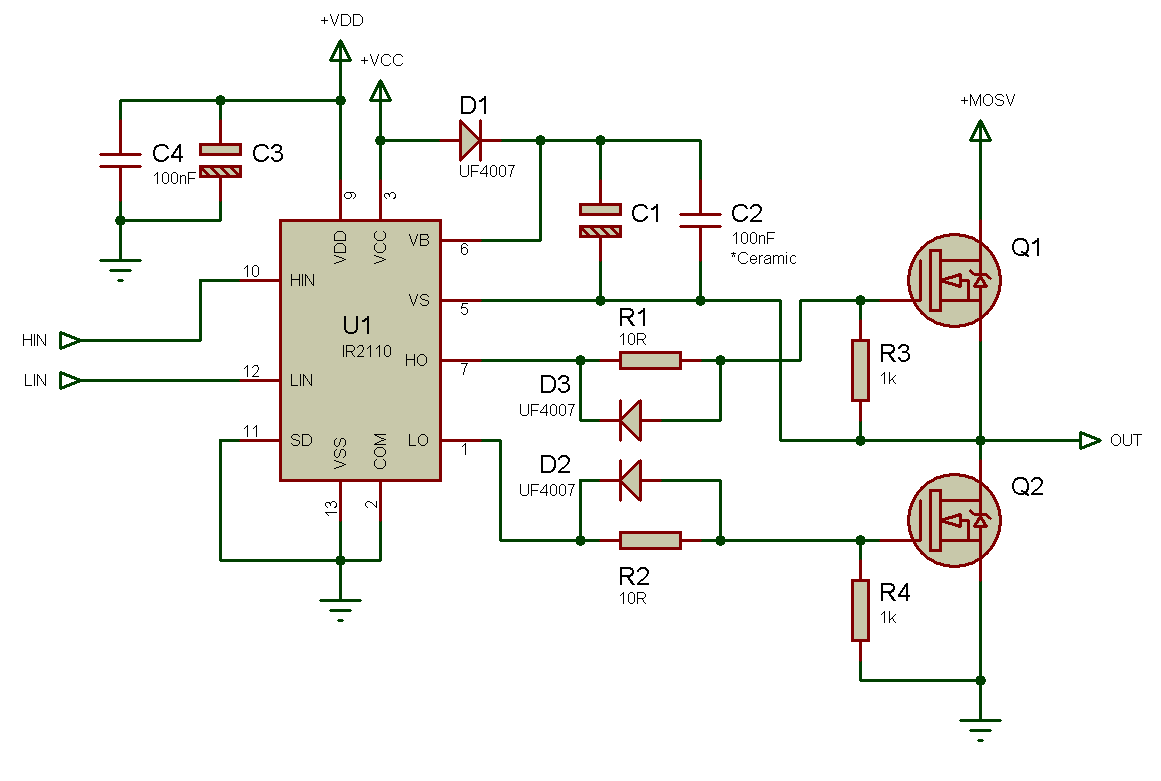
Рисунок 5 — Базовая схема на IR2110 для управления полумостом
D1, C1 и C2 совместно с IR2110 формируют усилительную цепь. Когда LIN = 1 и Q2 включен, то C1 и С2 заряжаются до уровня VB, так как один диод расположен ниже +VCC. Когда LIN = 0 и HIN = 1, заряд на C1 и С2 используется для добавления дополнительного напряжения, VB в данном случае, выше уровня источника Q1 для управления Q1 в конфигурации верхнего ключа. Достаточно большая ёмкость должна быть выбрана у C1 для того чтобы её хватило для обеспечения необходимого заряда для Q1, чтобы Q1 был включён всё это время. C1 также не должен иметь слишком большую ёмкость, так как процесс заряда будет проходить долго и уровень напряжения не будет увеличиваться в достаточной степени чтобы сохранить MOSFET включённым. Чем большее время требуется во включённом состоянии, тем большая требуется ёмкость. Таким образом меньшая частота требует большую ёмкость C1. Больший коэффициент заполнения требует большую ёмкость C1. Конечно есть формулы для расчёта ёмкости, но для этого нужно знать множество параметров, а некоторые из них мы может не знать, например ток утечки конденсатора. Поэтому я просто оценил примерную ёмкость. Для низких частот, таких как 50Гц, я использую ёмкость от 47мкФ до 68мкФ. Для высоких частот, таких как 30-50кГц, я использую ёмкость от 4.7мкФ до 22мкФ. Так как мы используем электролитический конденсатор, то керамический конденсатор должен быть использован параллельно с этим конденсатором. Керамический конденсатор не обязателен, если усилительный конденсатор — танталовый.
D2 и D3 разряжают затвор MOSFETов быстро, минуя затворные резисторы и уменьшая время отключения. R1 и R2 это токоограничивающие затворные резисторы.
+MOSV может быть максимум 500В.
+VCC должен идти с источника без помех. Вы должны установить фильтрующие и развязочные конденсаторы от +VCC к земле для фильтрации.
Давайте теперь рассмотрим несколько примеров схем с IR2110.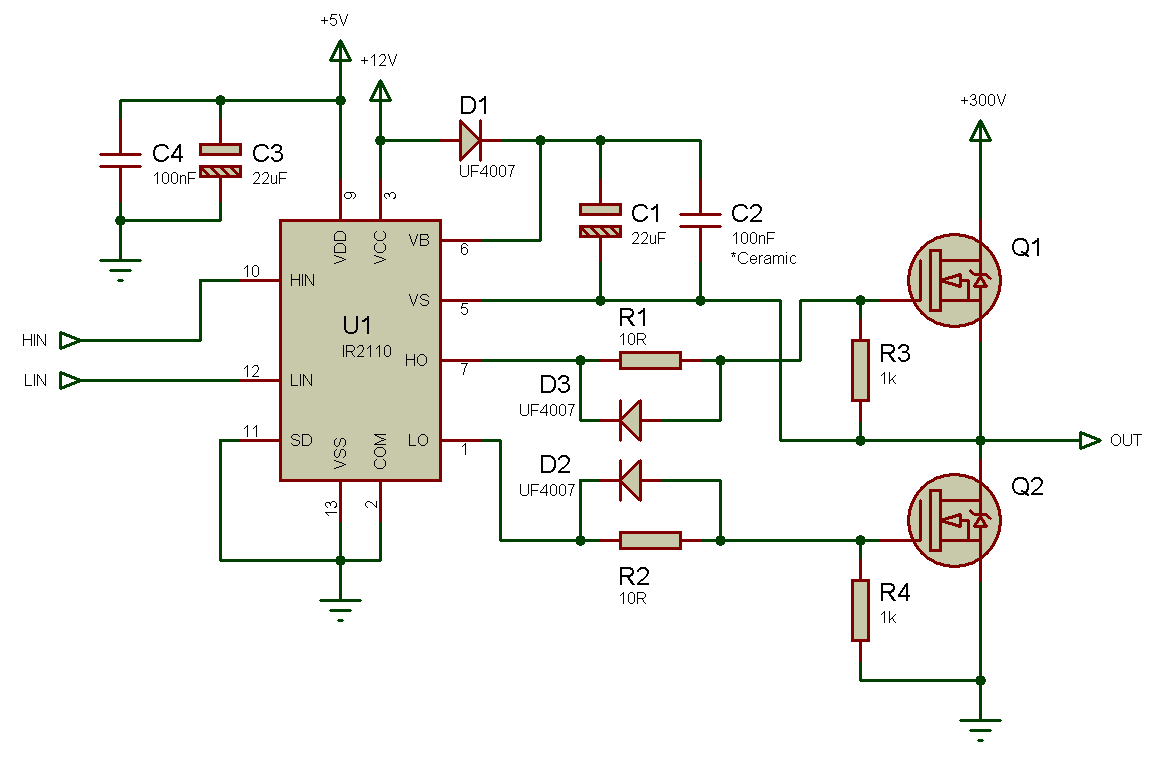
Рисунок 6 — Схема с IR2110 для высоковольтного полумоста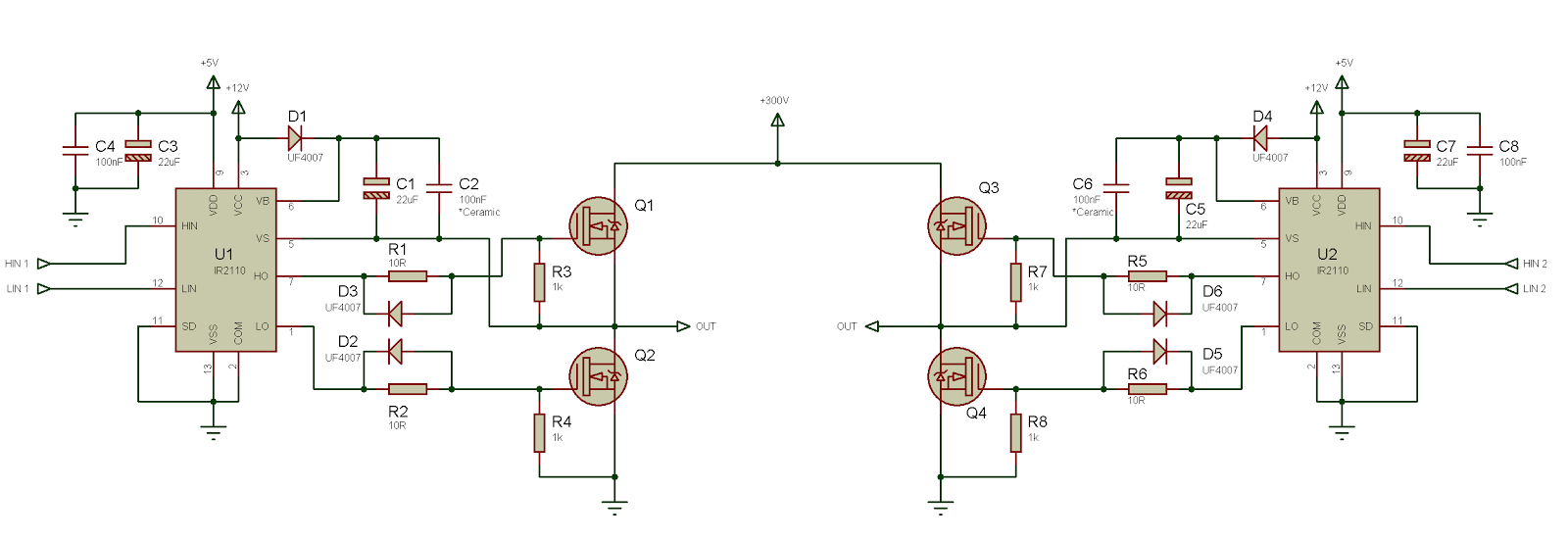
Рисунок 7 — Схема с IR2110 для высоковольтного полного моста с независимым управлением ключами (кликабельно)
На рисунке 7 мы видим IR2110, использованный для управления полным мостом. В ней нет ничего сложного и, я думаю, уже сейчас вы это понимаете. Также тут можно применить достаточно популярное упрощение: HIN1 мы соединяем с LIN2, а HIN2 мы соединяем с LIN1, тем самым мы получаем управление всеми 4 ключами используя всего 2 входных сигнала, вместо 4, это показано на рисунке 8.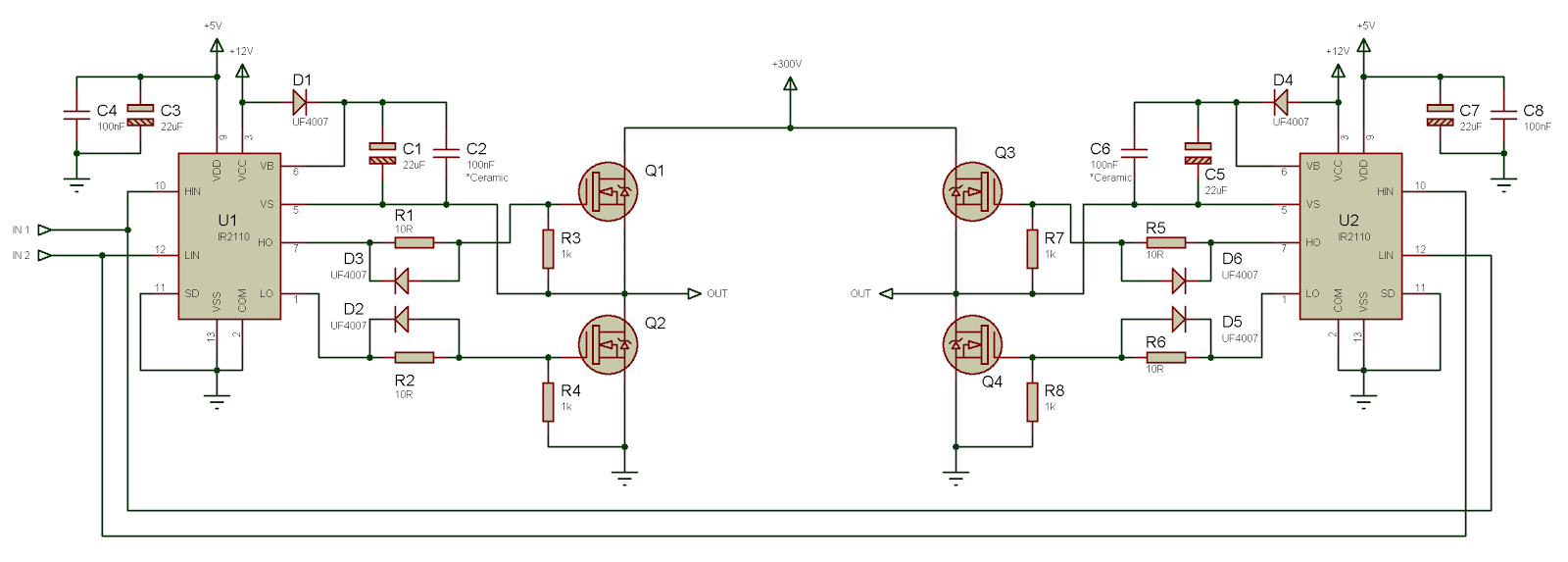
Рисунок 8 — Схема с IR2110 для высоковольтного полного моста с управлением ключами двумя входами (кликабельно)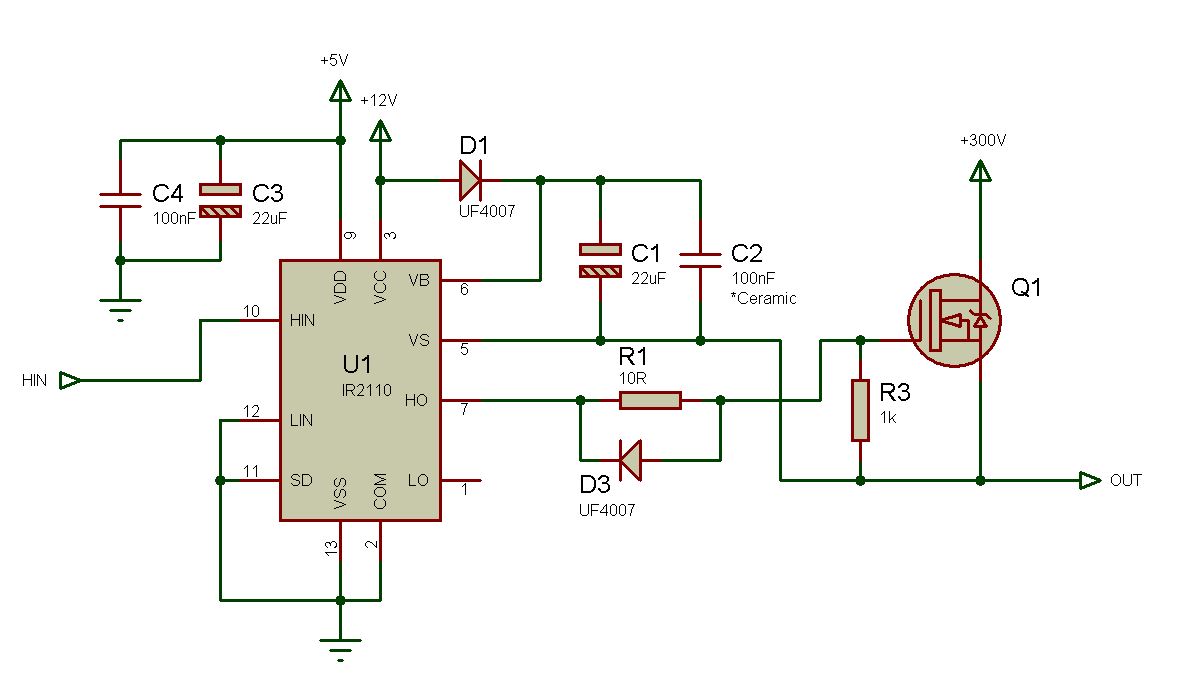
Рисунок 9 — Схема с IR2110 как высоковольтного драйвера верхнего уровня
На рисунке 9 мы видим IR2110 использованный как драйвер верхнего уровня. Схема достаточно проста и имеет такую же функциональность как было описано выше. Есть вещь которую нужно учесть — так как мы больше не имеем ключа нижнего уровня, то должна быть нагрузка подключённая с OUT на землю. Иначе усилительный конденсатор не сможет зарядится.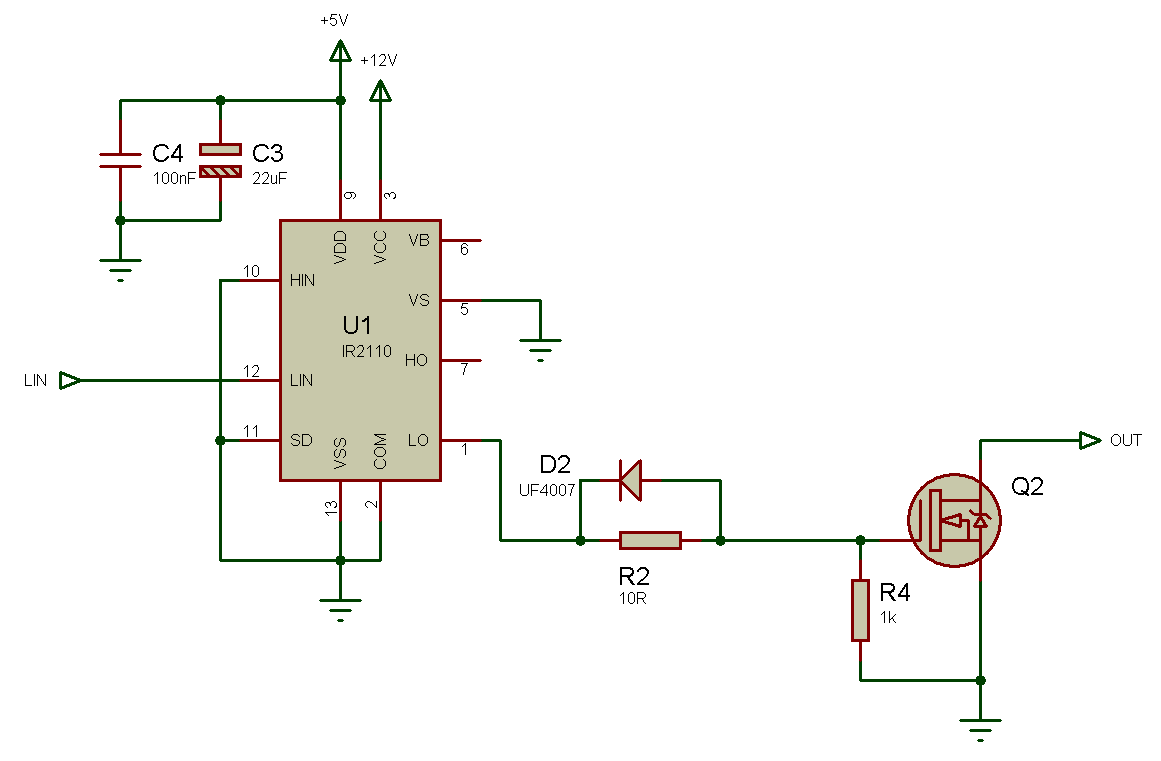
Рисунок 10 — Схема с IR2110 как драйвера нижнего уровня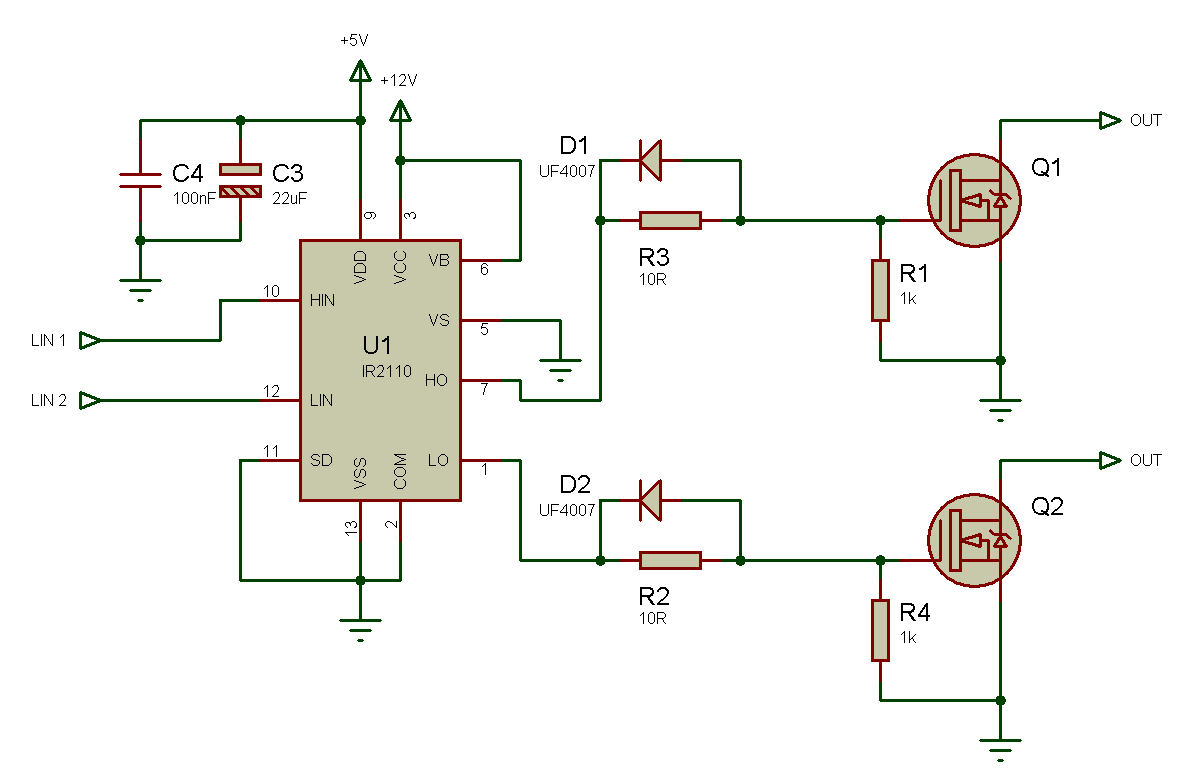
Рисунок 11 — Схема с IR2110 как двойного драйвера нижнего уровня
Если у вас проблемы с IR2110 и всё постоянно выходит из строя, горит или взрывается, то я уверен, что это из-за того, что вы не используете резисторы на затвор-исток, при условии, конечно, что вы всё спроектировали тщательно. НИКОГДА НЕ ЗАБЫВАЙТЕ О РЕЗИСТОРАХ НА ЗАТВОР-ИСТОК. Если вам интересно, вы можете прочитать о моем опыте с ними здесь (я также объясняю причину, по которой резисторы предотвращают повреждения): http://tahmidmc.blogspot.com/2012/10/magic-of-knowledge.html
Для дальнейшего чтения я рекомендую это: http://www.irf.com/technical-info/appnotes/an-978.pdf
Я видел как на многих форумах, люди бьются с проектированием схем на IR2110. У меня тоже было много трудностей прежде чем я cмог уверенно и последовательно строить успешные схемы драйвера на IR2110. Я попытался объяснить применение и использование IR2110 довольно тщательно, попутно всё объясняя и используя большое количество примеров, и я надеюсь, что это поможет вам в ваших начинаниях с IR2110.
Устройство и работа портов ввода-вывода микроконтроллеров AVR. Часть 3
Подключение транзистора к линии порта ввода/вывода
Изучив данный материал, в котором все очень детально и подробно описано с большим количеством примеров, вы сможете легко овладеть и программировать порты ввода/вывода микроконтроллеров AVR.
- Часть 1. Работа портов ввода/вывода
- Часть 2. Подключение светодиода к линии порта ввода/вывода
- Часть 3. Подключение транзистора к линии порта ввода/вывода
- Часть 4. Подключение кнопки к линии порта ввода/вывода
Пример будем рассматривать на микроконтроллере ATMega8.
Программу писать будем в Atmel Studio 6.0.
Эмулировать схему будем в Proteus 7 Professional.
Максимальный ток, который способен пропустить каждый порт ввода/вывода составляет 40 mA.
Максимальный ток, который способна пропускать каждая линия порта ввода/вывода составляет 20 mA.
Прежде чем подключать нагрузку, в том числе и транзистор к линиям порта ввода/вывода можно спалить его превысив допустимую нагрузку на линию порта ввода/вывода.
Что бы ограничить ток, который протекает через линии порта ввода/вывода микроконтроллера нужно рассчитать и подключить токоограничивающий резистор.
Рис: Рапиновка транзистора n-p-n-типа.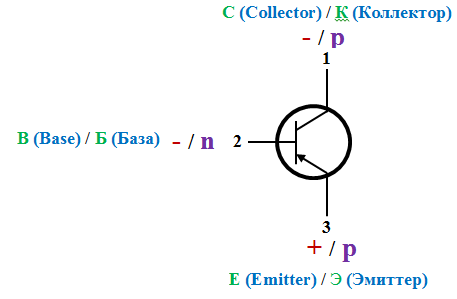
Рис: Рапиновка транзистора p-n-p-типа.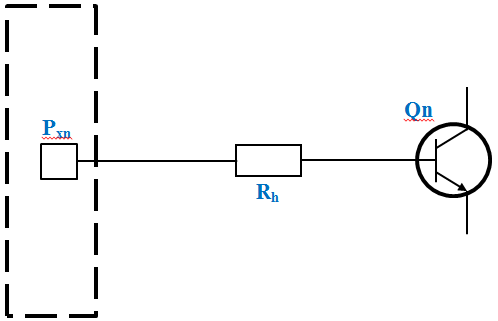
Рис: Подключение к микроконтроллеру транзистора n-p-n-типа.
Рис: Подключение к микроконтроллеру транзистора p-n-p -типа.
Сопротивление токоограничивающего резистора подключаемого к линиям портов ввода/вывода при подключении транзистора рассчитывается по формуле:
Пример:
— включения мощного светодиода через транзисторный ключ.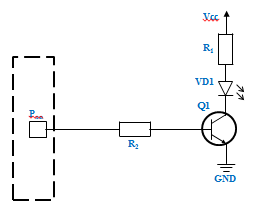
Рис: Подключение к микроконтроллеру светодиода через транзисторный ключ n-p-n-типа.
Данные на светодиод:
— напряжение источника питания – 5В;
— прямое падения напряжения на светодиоде – 1,35В(Берётся с datasheet на светодиод);
— прямой ток на светодиоде – 120мА (Берётся с datasheet на светодиод);
— коэффициент надежности роботы светодиода – 75% (Берётся с datasheet на светодиод);
Данные на транзистор BC547 берем из Datasheet-BC547: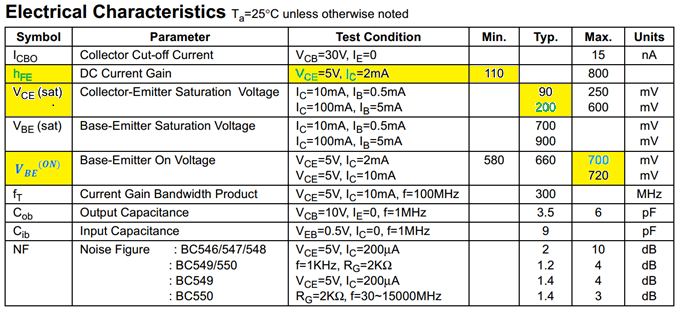
Данные на микроконтроллер:
— напряжение источника питания – 5В;
— падение напряжения на линии порта ввода/вывода – 0,5В (Берётся с datasheet на микроконтроллер: Vol(output low voltage) – если ток втекает, и Voh (output high voltage) – если ток вытекает);
Рассчитываем сопротивление R1: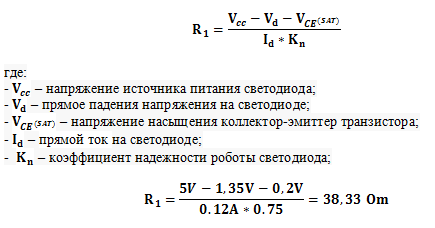
Таким образом, номинал резистора R1 = 38.33 Om, подбирается ближайшее большее значение сопротивления, например 39 Ом.
Определив номинал резистора R1, необходимо рассчитать мощность P1, измеряемая в ваттах, которая будет выделяться в резисторе, в виде тепла при протекании тока в цепи.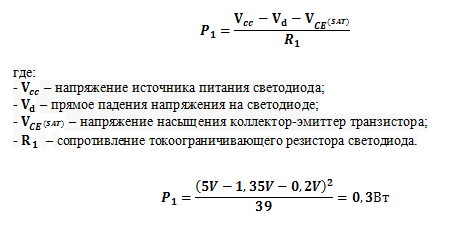
Рассчитав выделяемую мощность на резисторе, выбираем ближайшее большее значение мощности резистора.
Рассчитываем сопротивление R2: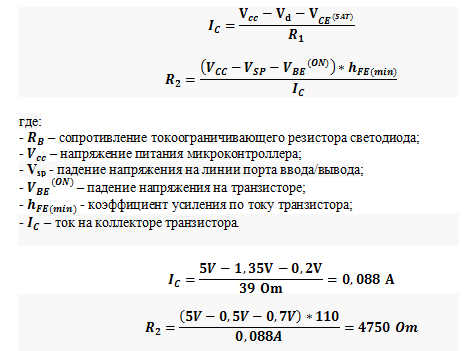
Таким образом, номинал резистора R2 = 4750 Om, подбирается ближайшее меньшее значение сопротивления, например 4,7 кОм.
Определив номинал резистора R2, необходимо рассчитать мощность P2, измеряемая в ваттах, которая будет выделяться в резисторе, в виде тепла при протекании тока в цепи.
Рассчитав выделяемую мощность на резисторе, выбираем ближайшее большее значение мощности резистора.
— подключения транзистора n-p-n-типа к линии порта ввода/вывода:
// Подключаем внешние библиотеки #include <AVR/io.h> #include <stdint.h> // Основная программа int main(void) { // Настраиваем порты ввода/вывода DDRC = 0b11111111; //Настраиваем все разряды порта C на режим «Выход» PORTC = 0b11111111; //Устанавливаем все разряды порта C в лог.»1″ (На выходе порта напряжение равное Vcc) // Вечный цикл while (1) { } }
— подключения транзистора p-n-p-типа к линии порта ввода/вывода: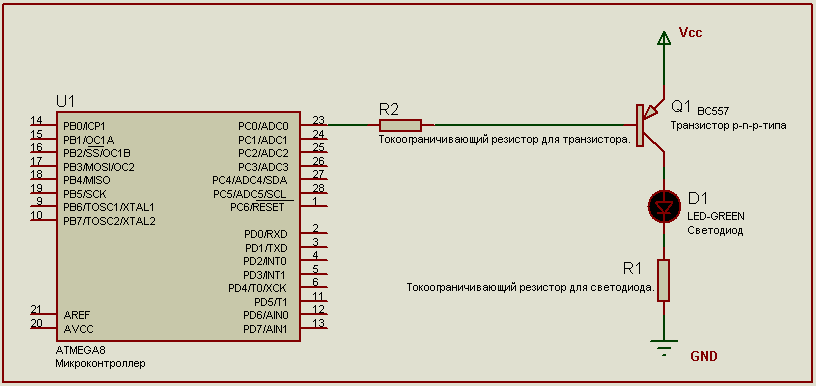
// Подключаем внешние библиотеки #include <AVR/io.h> #include <stdint.h> // Основная программа int main(void) { // Настраиваем порты ввода/вывода DDRC = 0b11111111; //Настраиваем все разряды порта C на режим «Выход» PORTC = 0b00000000; //Устанавливаем все разряды порта C в лог.»0″ (На выходе порта напряжение равное GND) // Вечный цикл while (1) { } }




Добавить комментарий